The control type of CM3 can be changed according to the control method. Type can be changed from the dedicated software “COOL WORKS QUICK” .
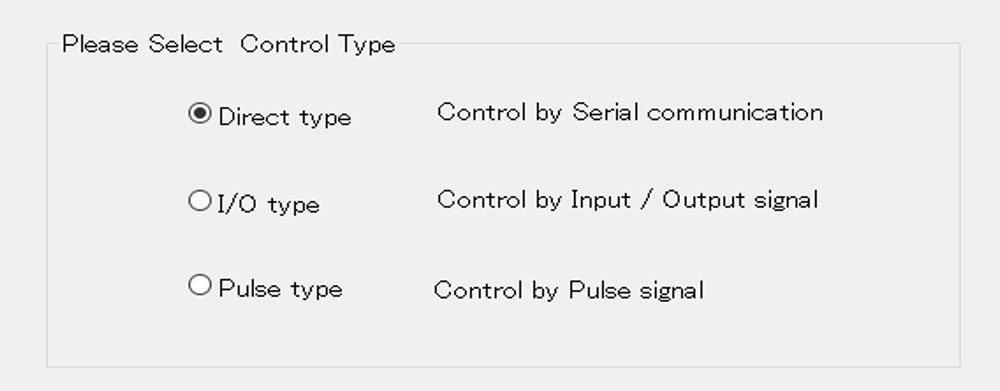
Direct type
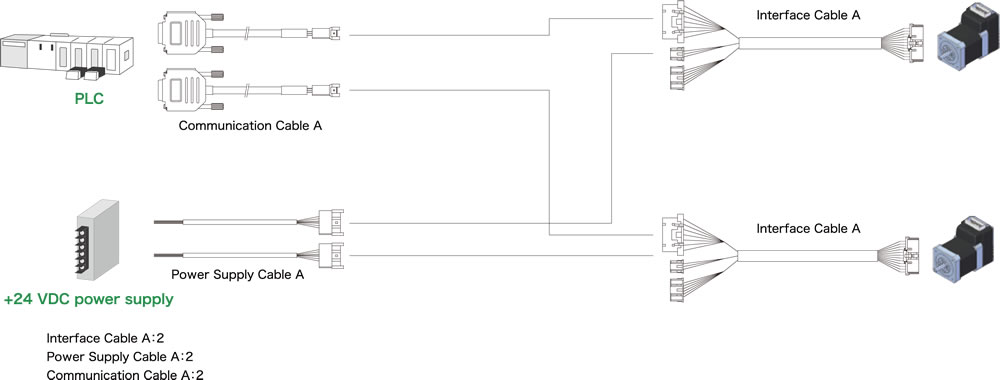
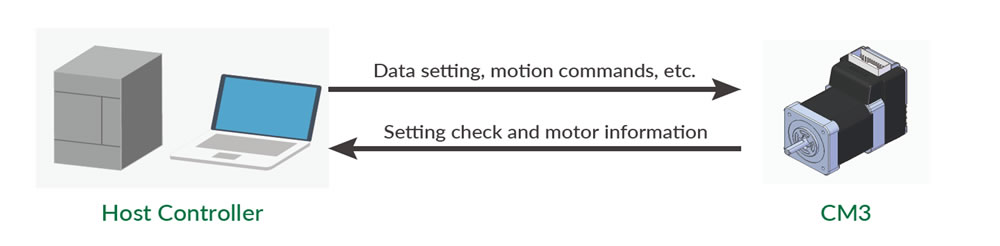
Direct type lets you operate CM3 by sending and receiving commands via RS-232C serial communication. Positioning can be done by simple settings as position, speed, acceleration and etc. Max 32 point Motion Data can be set and executed.
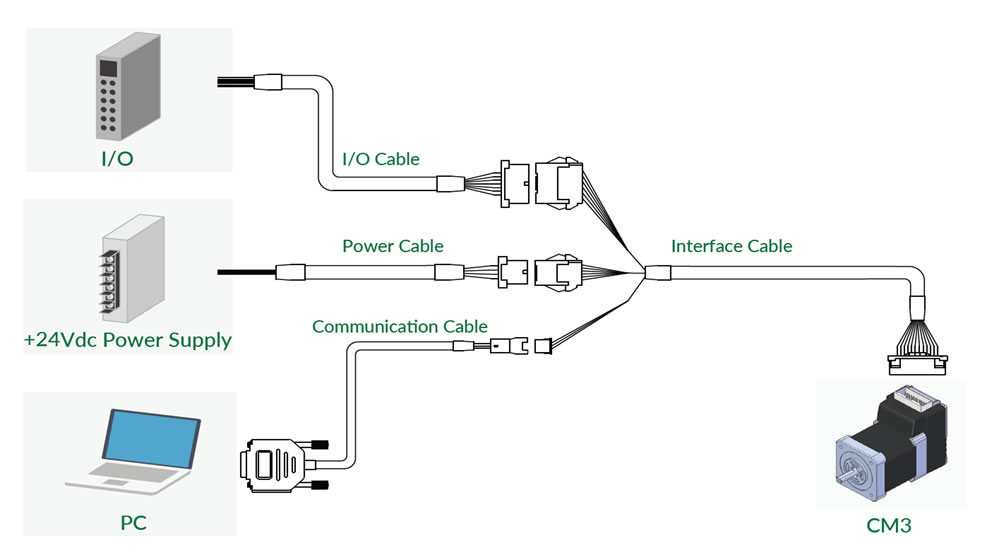
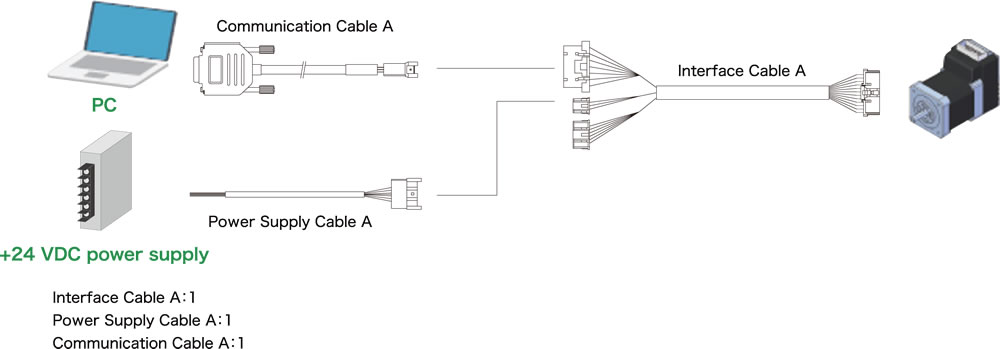
The wiring diagram is as follows
| V | Contetns | Detail |
|---|---|---|
| 0 | PTP Motion | Absolute positioning motion to the target position set by the P command width reference to the origin. |
| 1 | INC Motion | Incremental positioning motion to move the distance set by the P command from the current position. |
| 2 | PTP Push Motion | PTP motion with the limited torque by Q command. |
| 3 | INC Push Motion | INC Motion with the limited torque by Q command. |
| Name | Function | Name | Function |
|---|---|---|---|
| IN1 | Origin/Limit Sensor | IN2 | Limit Sensor |
| IN3 | Servo on/off | IN4 | Manual Mode |
| IN5+ | CCW Inching/jog | IN5- | CCW Inching/jog |
| IN6+ | CW Inching/jog | IN6- | CW Inching/jog |
| IN_COM | Input 1 to 4 Common | OUT1 | Output1/A-phase |
| OUT2 | Output2/B-phase | OUT3 | Output3/Z-phase |
| ALARM | Alarm Output | D_GND | Digital Ground |
Required cable

Interface Cable A
Required for each motor.
- CMIFA1-0400WR
- CMIFA1-1000WR
- CMIFA1-2000WR

Power Supply Cable A
Required for each motor.
- CMPWA1-1000S
- CMPWA1-3000S
Communication Cable A
Required for motor setup.
- CMRSA1-1000W
- CMRSA1-2000W
- CMRSA1-3000W

I/O Cable A
Required for I/O controlled motors.
- CMIOA1-1000S
- CMIOA1-3000S
Connection example 1
Connection example 2