クールマッスル3シリーズ
標準搭載アクチュエータが新登場!
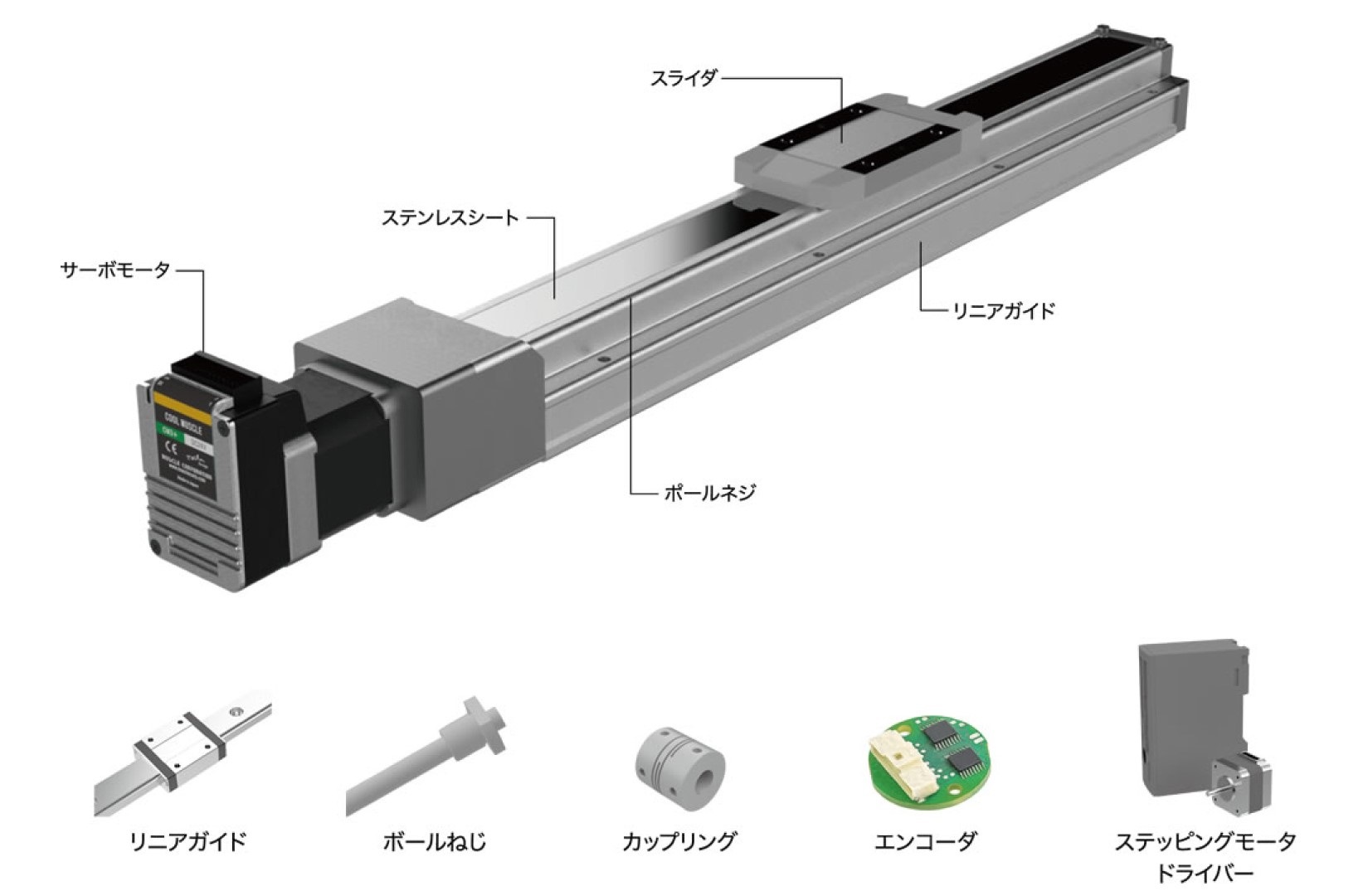
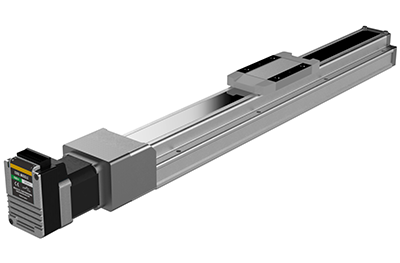
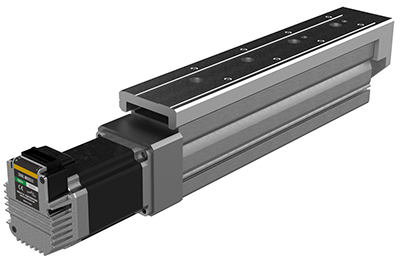
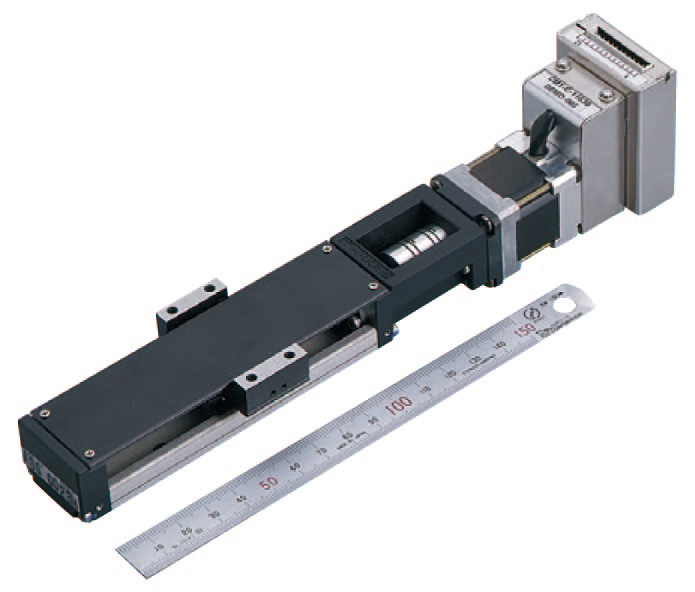
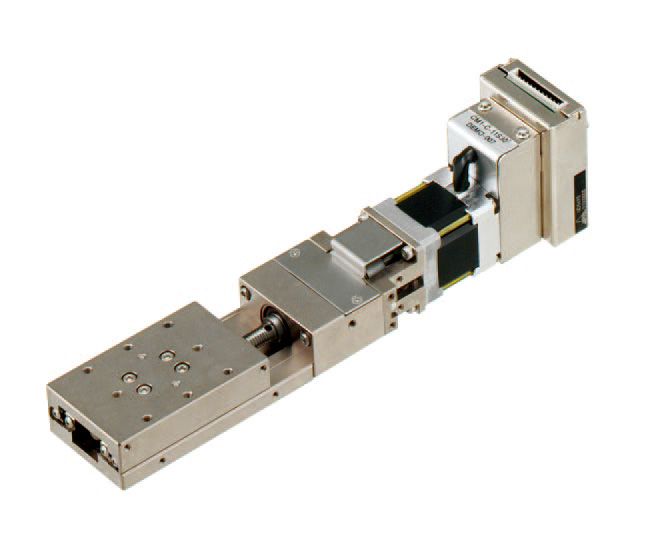
スライダタイプ
ACサーボモータの高速・高精度・低発熱と、ステッピングモータの高トルクを併せ持つ特性を保有し、
ドライバ・コントローラ・モータ・直動機構を組み合わせた「オールインワン」スライダー。

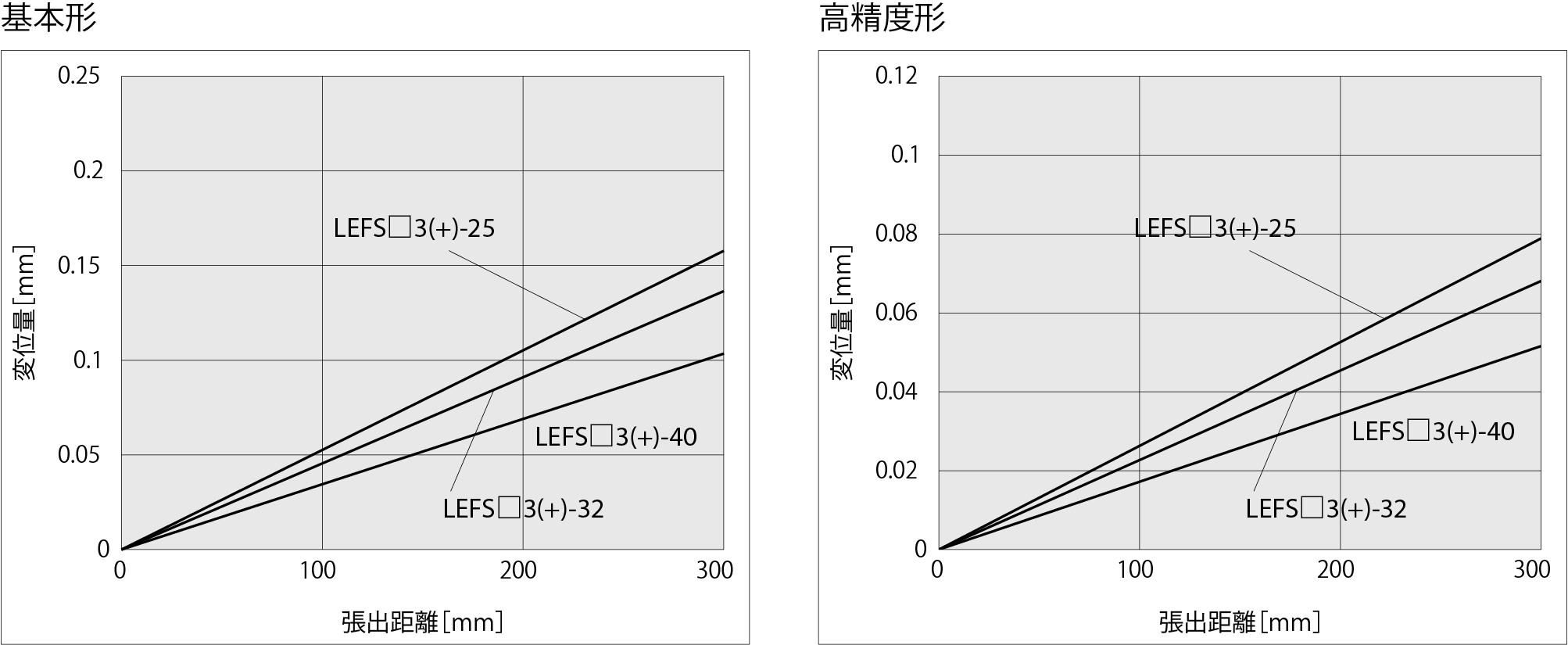
●繰返し位置決め精度±0.02mm(高精度形±0.015mm)
●最大可搬質量65kg
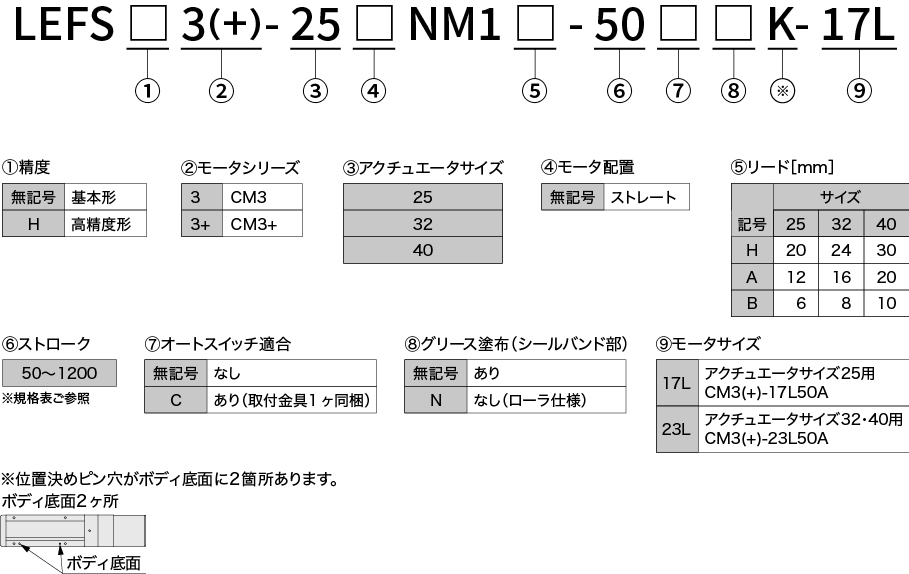
- LEFS□3(+/M)-25NM1A(B/H)-XXX-17L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP) - LEFS□3(+/M)-32NM1A(B/H)-XXX-23L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP) - LEFS□3(+/M)-40NM1A(B/H)-XXX-23L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP)
| 型式 | LEFS□3(+/M)-25 | LEFS□3(+/M)-32 | LEFS□3(+/M)-40 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| アクチュエータ仕様 | ストローク[mm] | 50~800(50刻み) | 50~1000(50刻み) | 150~1000(50刻み) 1100・1200 |
||||||||
| 最大可搬質量[kg] | 水平 | 12 | 25 | 30 | 20 | 45 | 50 | 30 | 55 | 65 | ||
| 垂直 | 4 | 8 | 15 | 5 | 10 | 20 | 7 | 15 | 30 | |||
| 速度[mm/s] ※注1 |
ストローク | ~400 | 1500 | 900 | 450 | 1500 | 1000 | 500 | 1500 | 1000 | 500 | |
| 401~500 | 1200 | 720 | 360 | 1500 | 1000 | 500 | 1500 | 1000 | 500 | |||
| 501~600 | 900 | 540 | 270 | 1200 | 800 | 400 | 1500 | 1000 | 500 | |||
| 601~700 | 700 | 420 | 210 | 930 | 620 | 310 | 1410 | 940 | 470 | |||
| 701~800 | 550 | 330 | 160 | 750 | 500 | 250 | 1140 | 760 | 380 | |||
| 801~900 | - | - | - | 610 | 410 | 200 | 930 | 620 | 310 | |||
| 901~1000 | - | - | - | 510 | 340 | 170 | 780 | 520 | 260 | |||
| 1001~1100 | - | - | - | - | - | - | 500 | 440 | 220 | |||
| 1101~1200 | - | - | - | - | - | - | 500 | 380 | 190 | |||
| 最大加減速度[mm/s2] | 20,000 | |||||||||||
| 繰り返し位置決め精度[mm/s2] | 基本形 | ±0.02 | ||||||||||
| 高精度形 | ±0.01 | |||||||||||
| ロストモーション[mm] ※注2 | 基本形 | 0.1以下 | ||||||||||
| 高精度形 | 0.05以下 | |||||||||||
| ねじリード[mm] | 20 | 12 | 6 | 24 | 16 | 8 | 30 | 20 | 10 | |||
| 耐衝撃/耐振動 ※注3 | 50/20 | |||||||||||
| 駆動方式 | ボールねじ | |||||||||||
| ガイド方式 | リニアガイド | |||||||||||
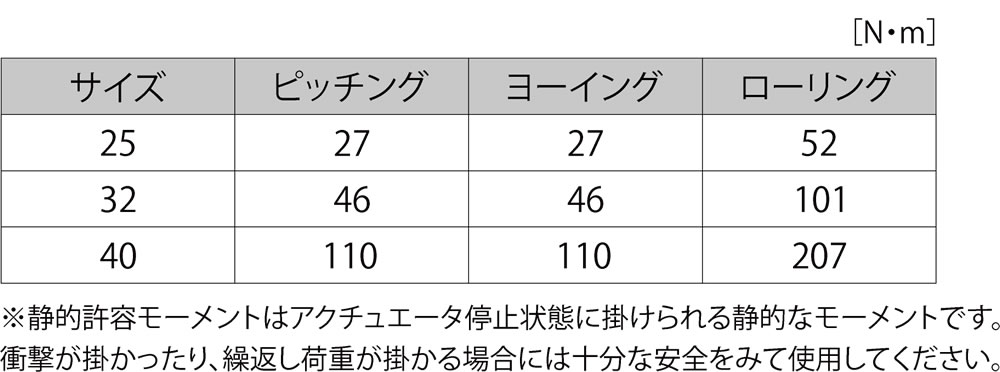
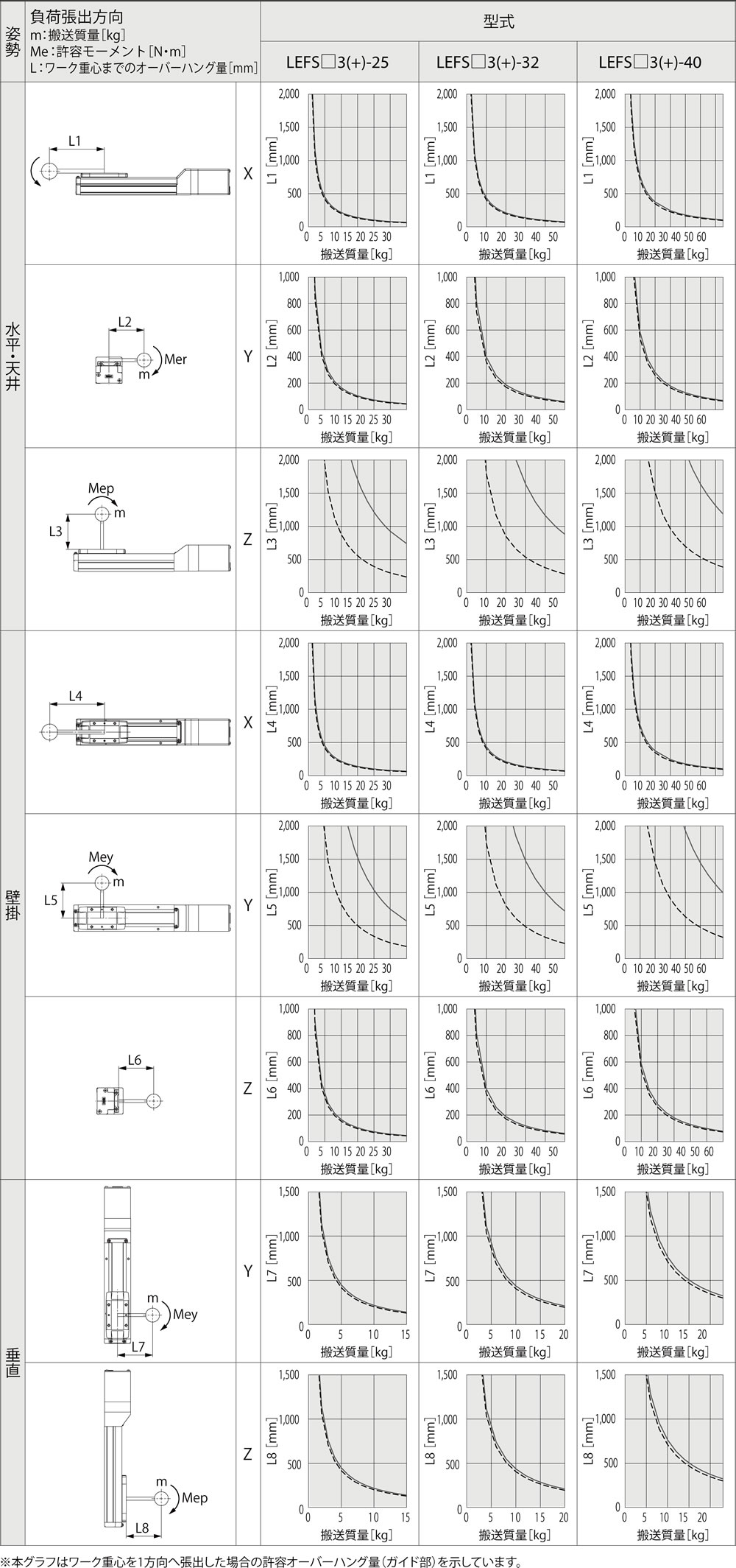
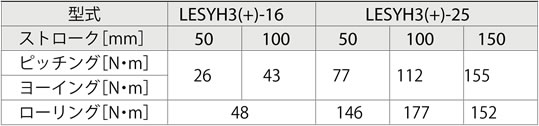
| 静的許容モーメント [N・m] ※注4 | Mep(ピッチング) | 27 | 46 | 110 | ||||||||
| Mep(ヨーイング) | 27 | 46 | 110 | |||||||||
| Mep(ローリング) | 52 | 101 | 207 | |||||||||
| 使用温度範囲[℃] | 5~40 | |||||||||||
| 使用温度範囲[%RH] | 5~90(結露なきこと) | |||||||||||
| 電気仕様 | モータ出力/サイズ | 60W/□42ロング | 100W/□56ロング | 100W/□56ロング | ||||||||
| モータ種類 | ステッピングモータ | |||||||||||
| エンコーダ | インクリメンタル | |||||||||||
| 電源電圧[V] | DC24±10% | |||||||||||
- ※注1)ストロークにより許容速度が変わります。
- ※注2)往復動作の誤差を補正する場合の目安値になります。
- ※注3)耐衝撃・・・落下式衝撃試験で、送りねじの軸方向および直角方向にて誤作動なし(初期における値)。
耐振動・・・45~2000Hz1掃引、送りねじの軸方向および直角方向にて誤作動なし(初期における値)。 - ※注4)静的許容モーメントはアクチュエータ停止状態に掛けられる静的なモーメントです。
衝撃がかかったり、繰り返し荷重が掛かる場合には十分な安全をみて使用してください。
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 12 | 12 | 12 | 8 | 6 | 4 | 4 | 4 |
| 250 | 12 | 12 | 10 | 7 | 5 | 4 | 4 | 4 |
| 500 | 12 | 12 | 7 | 5 | 4 | 4 | 4 | 4 |
| 750 | 12 | 10 | 5 | 3 | 3 | 4 | 3 | 3 |
| 1000 | 12 | 8 | 4 | 3 | 2 | 3 | 3 | 2 |
| 1250 | 12 | 7 | 3 | 2 | 2 | 3 | 2 | 2 |
| 1500 | 12 | 5 | 3 | 2 | 1 | 2 | 2 | 1 |
| 1667 | 12 | 5 | 2 | 2 | 1 | 2 | 2 | 1 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 25 | 25 | 21 | 14 | 10 | 8 | 8 | 8 |
| 200 | 25 | 25 | 15 | 10 | 8 | 8 | 8 | 8 |
| 400 | 25 | 19 | 10 | 6 | 5 | 8 | 6 | 5 |
| 600 | 25 | 13 | 6 | 4 | 3 | 6 | 4 | 3 |
| 800 | 25 | 10 | 5 | 3 | 3 | 5 | 3 | 3 |
| 1000 | 25 | 8 | 4 | 3 | 2 | 3 | 3 | 2 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 30 | 30 | 30 | 28 | 21 | 15 | 15 | 15 |
| 100 | 30 | 30 | 30 | 20 | 15 | 15 | 15 | 15 |
| 200 | 30 | 30 | 19 | 13 | 10 | 15 | 13 | 10 |
| 300 | 30 | 26 | 13 | 9 | 6 | 12 | 9 | 6 |
| 400 | 30 | 20 | 10 | 7 | 5 | 9 | 7 | 5 |
| 500 | 30 | 15 | 8 | 5 | 4 | 7 | 5 | 4 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 20 | 20 | 20 | 16 | 12 | 5 | 5 | 5 |
| 300 | 20 | 20 | 18 | 12 | 9 | 5 | 5 | 5 |
| 600 | 20 | 20 | 11 | 7 | 6 | 5 | 5 | 5 |
| 900 | 20 | 15 | 8 | 5 | 4 | 5 | 5 | 4 |
| 1200 | 20 | 11 | 6 | 4 | 3 | 5 | 4 | 3 |
| 1500 | 20 | 9 | 4 | 3 | 2 | 4 | 3 | 2 |
| 1800 | 20 | 8 | 4 | 3 | 2 | 3 | 3 | 2 |
| 2000 | 20 | 7 | 3 | 2 | 2 | 3 | 2 | 2 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 45 | 45 | 36 | 24 | 18 | 10 | 10 | 10 |
| 200 | 45 | 45 | 27 | 18 | 14 | 10 | 10 | 10 |
| 400 | 45 | 34 | 17 | 11 | 8 | 10 | 10 | 8 |
| 600 | 45 | 23 | 11 | 8 | 6 | 10 | 8 | 6 |
| 800 | 45 | 17 | 8 | 6 | 4 | 8 | 6 | 4 |
| 1000 | 45 | 13 | 7 | 4 | 3 | 6 | 4 | 3 |
| 1200 | 45 | 11 | 6 | 4 | 3 | 5 | 4 | 3 |
| 1333 | 45 | 10 | 5 | 3 | 3 | 5 | 3 | 3 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 50 | 50 | 50 | 48 | 36 | 20 | 20 | 20 |
| 100 | 50 | 50 | 50 | 36 | 27 | 20 | 20 | 20 |
| 200 | 50 | 50 | 34 | 22 | 17 | 20 | 20 | 17 |
| 300 | 50 | 45 | 23 | 15 | 11 | 20 | 15 | 11 |
| 400 | 50 | 34 | 17 | 11 | 8 | 15 | 11 | 8 |
| 500 | 50 | 27 | 13 | 9 | 7 | 12 | 9 | 7 |
| 600 | 50 | 23 | 11 | 8 | 6 | 10 | 8 | 6 |
| 667 | 50 | 20 | 10 | 7 | 5 | 9 | 7 | 5 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 30 | 30 | 19 | 13 | 10 | 7 | 7 | 7 |
| 250 | 30 | 30 | 18 | 12 | 9 | 7 | 7 | 7 |
| 500 | 30 | 24 | 12 | 8 | 6 | 7 | 7 | 6 |
| 750 | 30 | 18 | 9 | 6 | 4 | 7 | 6 | 4 |
| 1000 | 30 | 14 | 7 | 5 | 3 | 6 | 5 | 3 |
| 1500 | 30 | 9 | 4 | 3 | 2 | 4 | 3 | 2 |
| 2000 | 30 | 7 | 3 | 2 | 2 | 3 | 2 | 2 |
| 2500 | 27 | 5 | 3 | 2 | 1 | 2 | 2 | 1 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 55 | 55 | 29 | 19 | 14 | 15 | 15 | 14 |
| 250 | 55 | 44 | 22 | 15 | 11 | 15 | 15 | 11 |
| 500 | 55 | 27 | 13 | 9 | 7 | 12 | 9 | 7 |
| 750 | 55 | 18 | 9 | 6 | 5 | 8 | 6 | 5 |
| 1000 | 55 | 13 | 7 | 4 | 3 | 6 | 4 | 3 |
| 1250 | 54 | 11 | 5 | 4 | 3 | 5 | 4 | 3 |
| 1500 | 45 | 9 | 5 | 3 | 2 | 4 | 3 | 2 |
| 1667 | 40 | 8 | 4 | 3 | 2 | 4 | 3 | 2 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 65 | 65 | 58 | 38 | 29 | 30 | 30 | 29 |
| 125 | 65 | 65 | 44 | 29 | 22 | 30 | 29 | 22 |
| 250 | 65 | 54 | 27 | 18 | 13 | 24 | 18 | 13 |
| 375 | 65 | 36 | 18 | 12 | 9 | 16 | 12 | 9 |
| 500 | 65 | 27 | 13 | 9 | 7 | 12 | 9 | 7 |
| 625 | 65 | 21 | 11 | 7 | 5 | 10 | 7 | 5 |
| 750 | 65 | 18 | 9 | 6 | 5 | 8 | 6 | 5 |
| 833 | 65 | 16 | 8 | 5 | 4 | 7 | 5 | 4 |
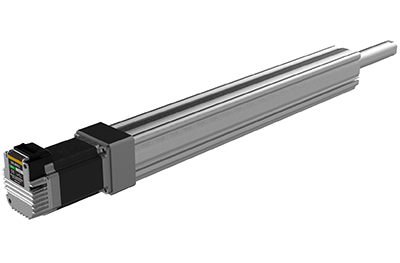
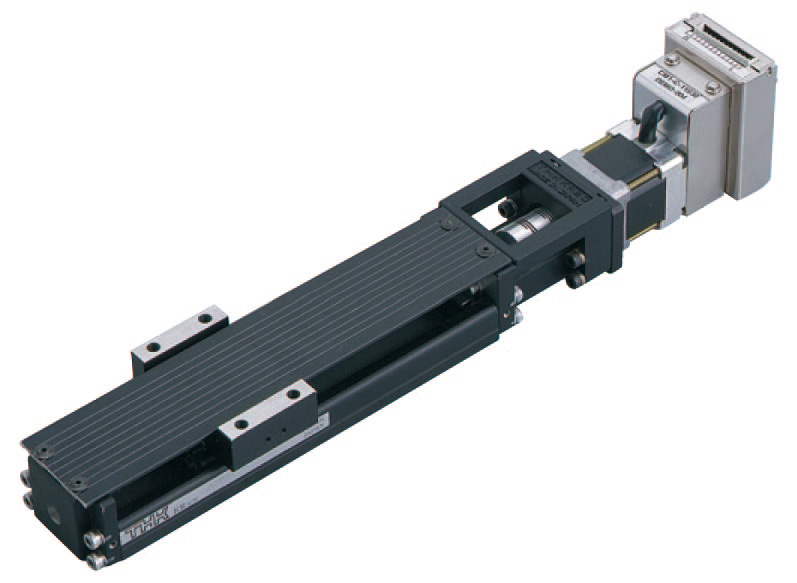
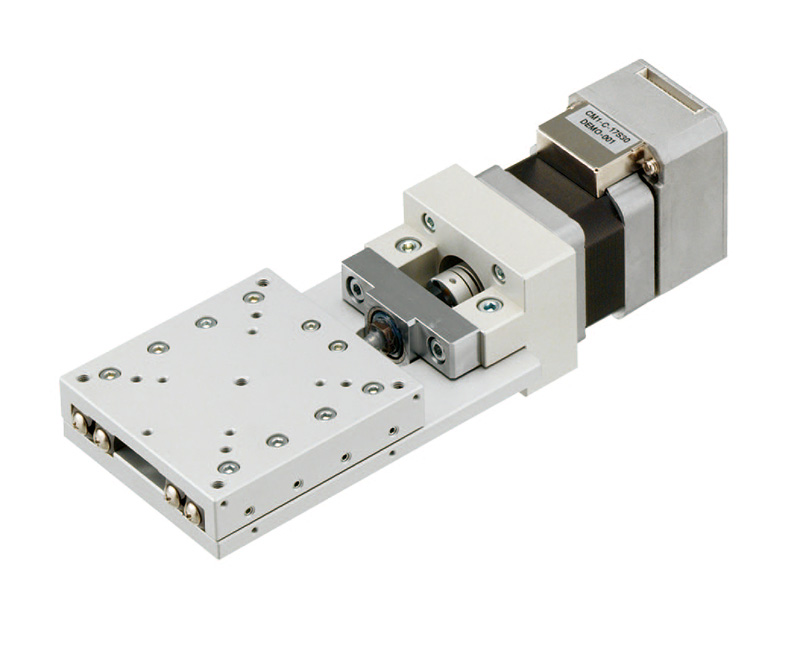
ロッドタイプ
ACサーボモータの高速・高精度・低発熱と、ステッピングモータの高トルクを併せ持つ特性を保有し、
ドライバ・コントローラ・モータ・直動機構を組み合わせた「オールインワン」スライダー。

●多点位置決め制御および押当て制御可能
●繰返し位置決め精度±0.02mm(高精度形±0.015mm)
- LEY□3(+/M)-25(D/R/L)NM1A(B/H)-XXX-17L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP) - LEY□3(+/M)-32(D/R/L)NM1A(B/H)-XXX-23L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP)
| 型式 | LEY□3(+/M)-25 | LEY□3(+/M)-32 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| アクチュエータ仕様 | ストローク[mm] | 30・50・100・150・200・250・300・300・350・400 | 30・50・100・150・200・250・300・300・350・400・450・500 | ||||||
| 最大可搬質量[kg]※注1 | 水平 | 30 | 55 | 70 | 40 | 60 | 80 | ||
| 垂直 | 8 | 16 | 30 | 11 | 22 | 43 | |||
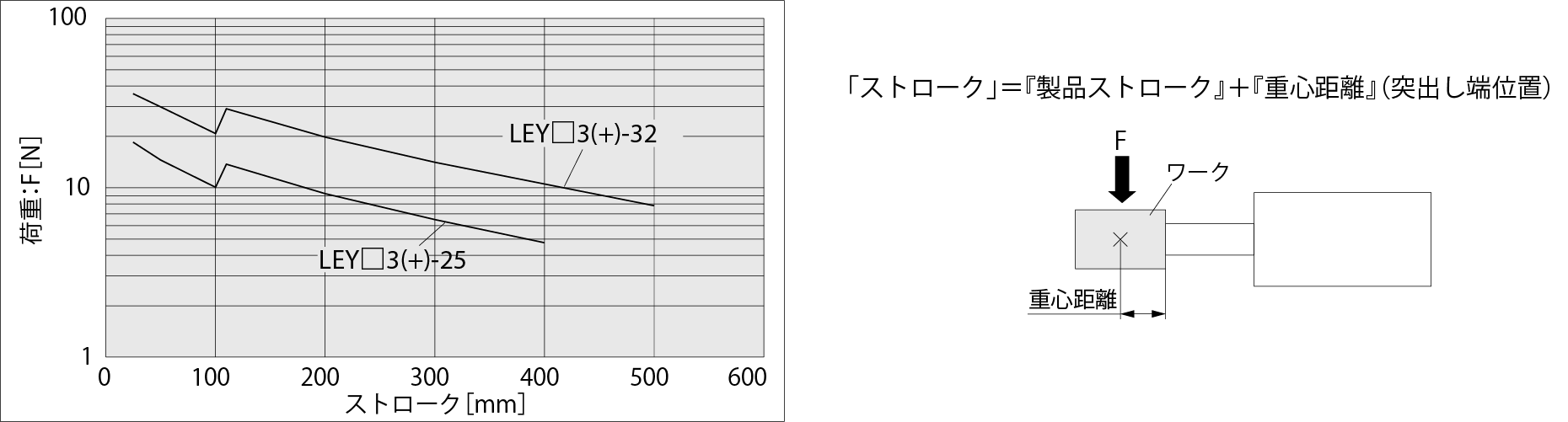
| 最大押当て推力[N] ※注2 | 163 | 327 | 653 | 247 | 495 | 990 | |||
| 速度[mm/s] ※注3 |
ストローク | 30~300 | 900 | 450 | 255 | 1000 | 500 | 250 | |
| 305~400 | 600 | 300 | 155 | 1000 | 500 | 250 | |||
| 405~500 | - | - | - | 640 | 320 | 160 | |||
| 押当て速度[mm/s] | 35以下 | 30以下 | |||||||
| 最大加減速度[mm/s2] | 5,000 | ||||||||
| 繰り返し位置決め精度[mm/s2] | 基本形 | ±0.02 | |||||||
| 高精度形 | ±0.01 0.1以下 |
||||||||
| ロストモーション[mm] ※注4 | 基本形 | 0.1以下 | |||||||
| 高精度形 | 0.05以下 | ||||||||
| ねじリード[mm] | 12 | 6 | 3 | 16 | 8 | 4 | |||
| 耐衝撃/耐振動 ※注5 | 50/20 | ||||||||
| 駆動方式 | ポールねじ | ||||||||
| ガイド方式 | ガイド方式 | ||||||||
| 使用温度範囲[℃] | 5~40 | ||||||||
| 使用温度範囲[%RH] | 5~90(結露なきこと) | ||||||||
| 電気仕様 | モータ出力/サイズ | 60W/□42ロング | 100W/□56ロング | ||||||
| モータ種類 | ステッピングモータ | ||||||||
| エンコーダ | インクリメンタル | ||||||||
| 電源電圧[V] | DC24±10% | ||||||||
- ※注1)水平:搬送質量の最大値です(外部にガイドが必要[ガイド摩擦係数:0.1以下])。
実際の搬送質量および搬送速度は、外部のガイド条件により変わります。また、搬送質量により速度が変動します。
垂直:搬送質量により速度が変動します。また、( )内の値は加減速度です。3000[mm/s2]以下に設定してください。 - ※注2)推当て推力の精度は±20%(F.S)となります。
- ※注3)ケーブル長さ・負荷・取付条件等により、速度・推力は変化する場合があります。
- ※注4)往復動作の誤差を補正する場合の目安値になります。
- ※注5)耐衝撃・・・落下式衝撃試験で、送りねじの軸方向および直角方向にて誤作動なし(初期における値)。
耐振動・・・45~2000Hz 1掃引、送りねじの軸方向および直角方向にて誤作動なし(初期における値)。
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 30 | 30 | 21 | 14 | 10 | 8 | 8 | 8 |
| 200 | 30 | 30 | 15 | 10 | 8 | 8 | 8 | 8 |
| 400 | 30 | 19 | 10 | 6 | 5 | 8 | 8 | 8 |
| 600 | 30 | 13 | 6 | 4 | 3 | 6 | 4 | 3 |
| 800 | 30 | 10 | 5 | 3 | 3 | 5 | 3 | 3 |
| 1000 | 30 | 8 | 4 | 3 | 2 | 3 | 3 | 2 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 55 | 55 | 42 | 28 | 21 | 16 | 16 | 16 |
| 100 | 55 | 55 | 31 | 20 | 15 | 16 | 16 | 15 |
| 200 | 55 | 38 | 19 | 13 | 10 | 16 | 13 | 10 |
| 300 | 55 | 26 | 10 | 7 | 5 | 9 | 7 | 6 |
| 400 | 55 | 20 | 10 | 7 | 5 | 9 | 7 | 5 |
| 500 | 55 | 15 | 8 | 5 | 4 | 7 | 5 | 4 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 70 | 70 | 70 | 55 | 42 | 30 | 30 | 30 |
| 25 | 70 | 70 | 70 | 49 | 37 | 30 | 30 | 30 |
| 50 | 70 | 70 | 61 | 41 | 31 | 30 | 30 | 30 |
| 100 | 70 | 70 | 38 | 26 | 19 | 30 | 26 | 19 |
| 150 | 70 | 51 | 26 | 17 | 13 | 23 | 17 | 13 |
| 200 | 70 | 41 | 20 | 14 | 10 | 19 | 14 | 10 |
| 250 | 70 | 31 | 15 | 10 | 8 | 14 | 10 | 8 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 40 | 40 | 36 | 24 | 18 | 11 | 11 | 11 |
| 200 | 40 | 40 | 27 | 18 | 14 | 11 | 11 | 11 |
| 400 | 40 | 34 | 17 | 11 | 8 | 11 | 11 | 8 |
| 600 | 40 | 23 | 11 | 8 | 6 | 10 | 8 | 8 |
| 800 | 40 | 17 | 8 | 6 | 4 | 8 | 6 | 4 |
| 1000 | 40 | 13 | 7 | 4 | 3 | 6 | 4 | 3 |
| 1200 | 40 | 11 | 6 | 4 | 3 | 5 | 4 | 3 |
| 1333 | 40 | 10 | 5 | 3 | 3 | 5 | 3 | 3 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 60 | 60 | 60 | 48 | 36 | 22 | 22 | 22 |
| 100 | 60 | 60 | 55 | 36 | 27 | 22 | 22 | 22 |
| 200 | 60 | 60 | 34 | 22 | 17 | 22 | 22 | 17 |
| 300 | 60 | 45 | 23 | 15 | 11 | 21 | 15 | 11 |
| 400 | 60 | 43 | 17 | 11 | 8 | 15 | 11 | 8 |
| 500 | 60 | 27 | 11 | 8 | 6 | 10 | 8 | 8 |
| 600 | 60 | 20 | 10 | 7 | 5 | 9 | 7 | 5 |
| 667 | 60 | 20 | 10 | 7 | 5 | 9 | 7 | 5 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 80 | 80 | 80 | 80 | 72 | 43 | 43 | 43 |
| 50 | 80 | 80 | 80 | 73 | 55 | 43 | 43 | 43 |
| 100 | 80 | 80 | 67 | 45 | 34 | 43 | 43 | 34 |
| 150 | 80 | 80 | 45 | 30 | 23 | 43 | 30 | 23 |
| 200 | 80 | 67 | 34 | 22 | 17 | 31 | 22 | 17 |
| 250 | 80 | 54 | 27 | 18 | 13 | 24 | 18 | 13 |
| 300 | 80 | 45 | 23 | 15 | 11 | 21 | 15 | 11 |
| 333 | 80 | 40 | 20 | 13 | 10 | 18 | 13 | 10 |


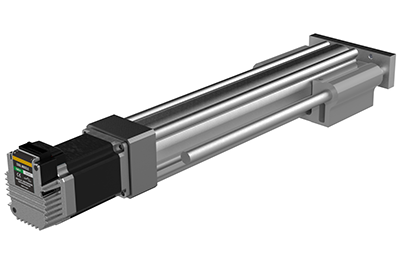
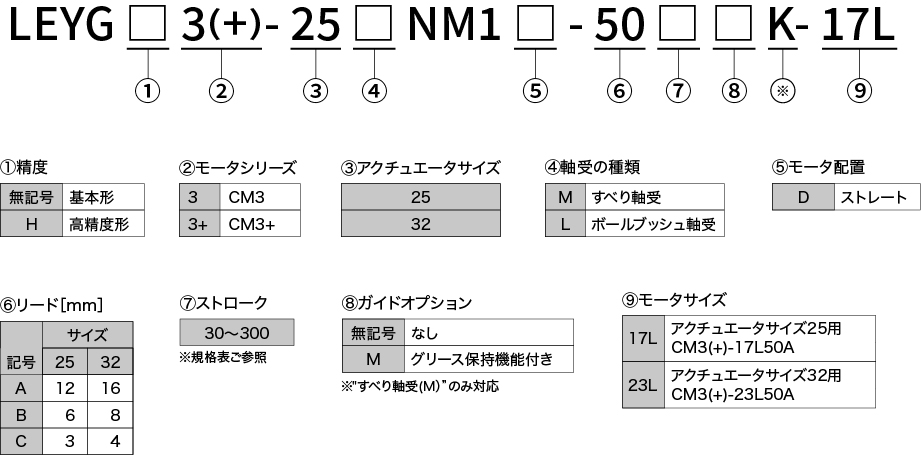
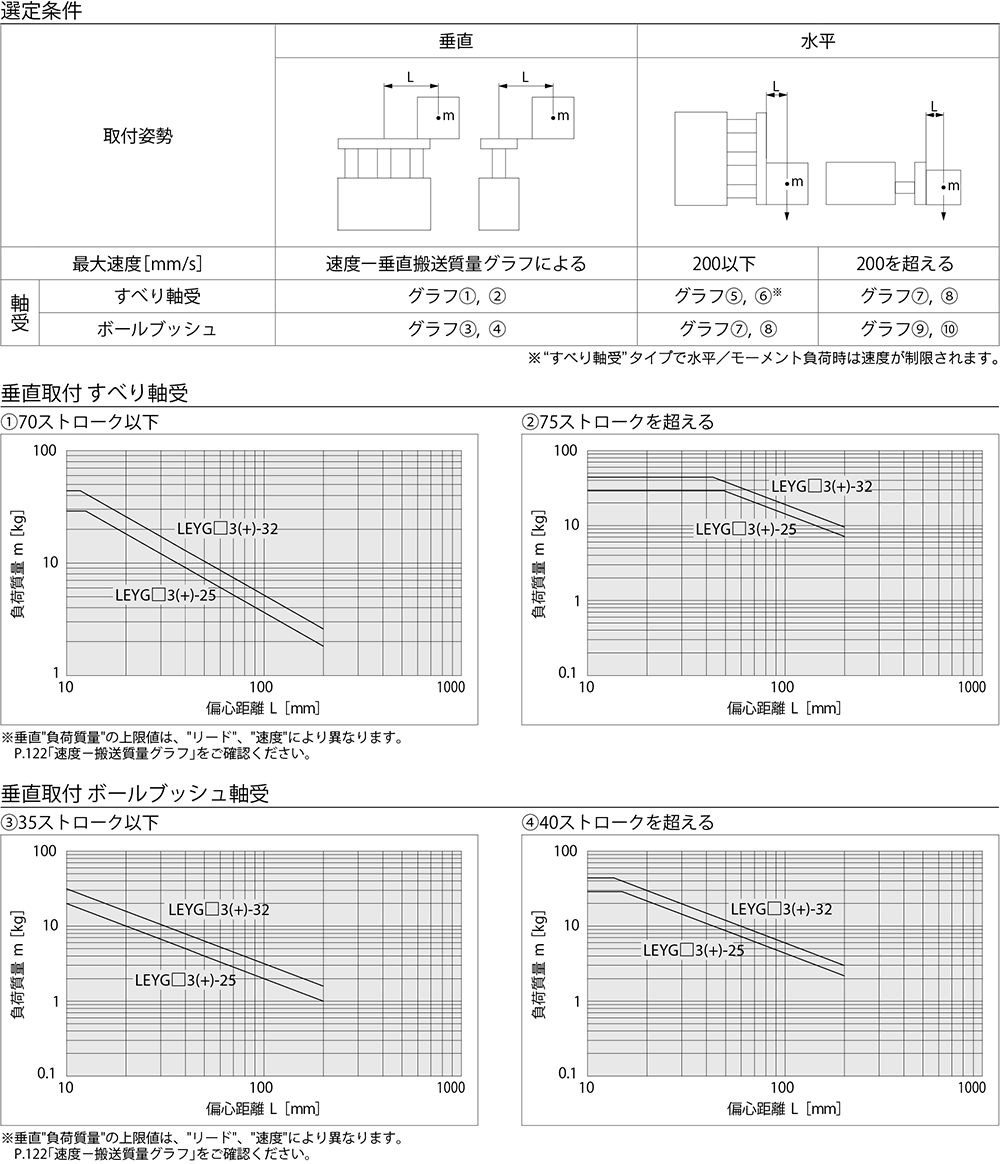
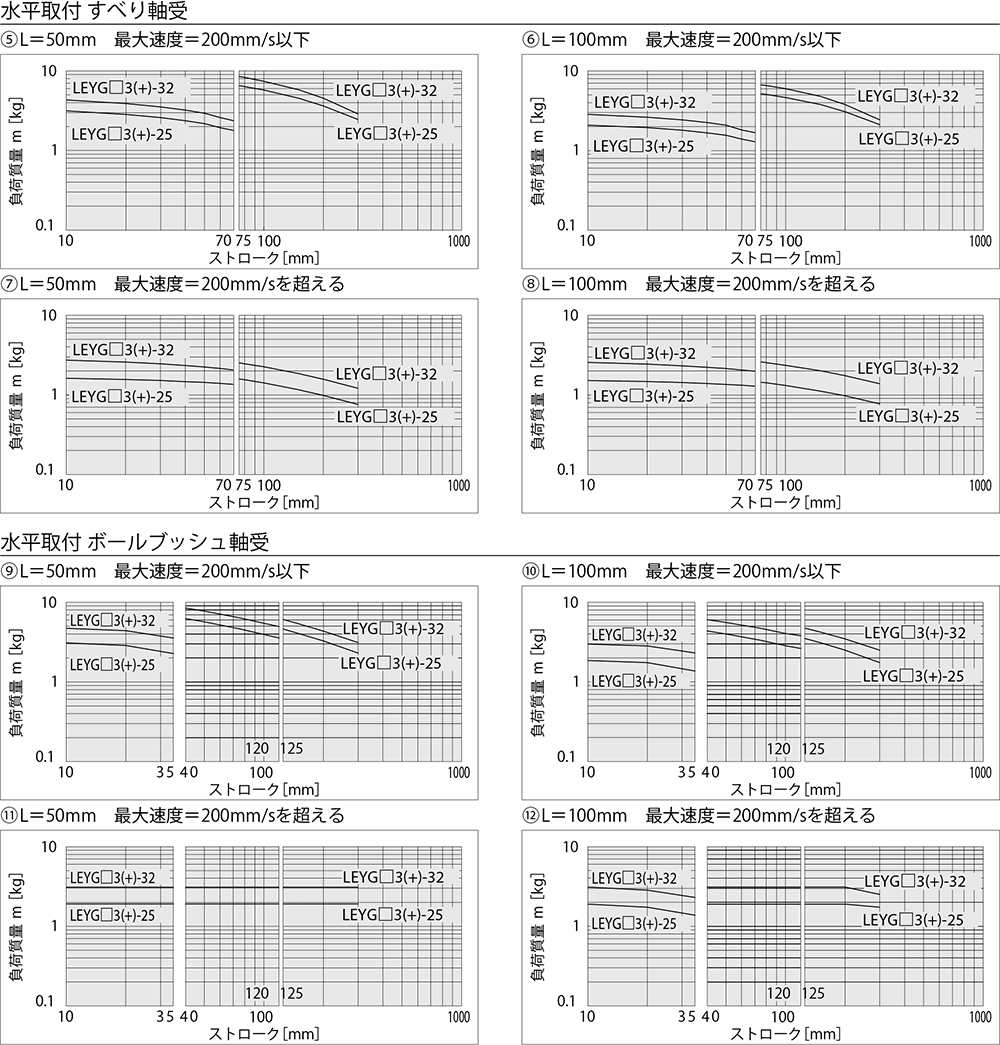
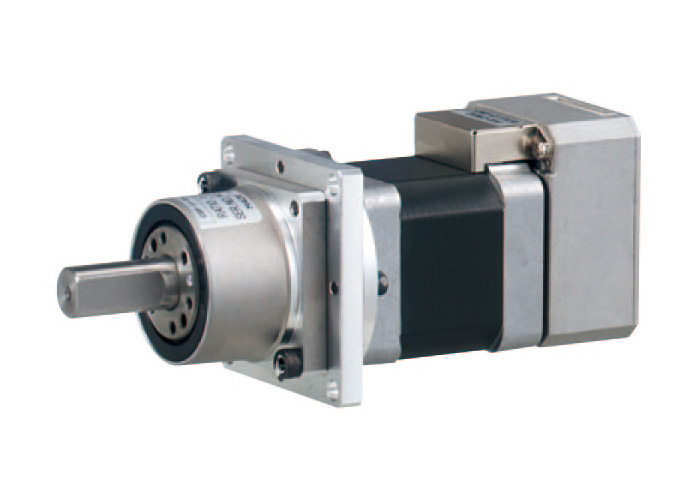
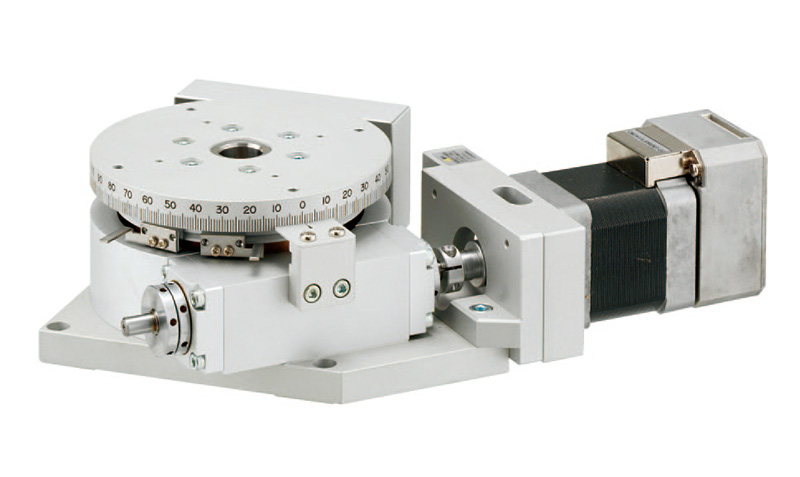
ガイド付きロッドタイプ
ACサーボモータの高速・高精度・低発熱と、ステッピングモータの高トルクを併せ持つ特性を保有し、
ドライバ・コントローラ・モータ・直動機構を組み合わせた「オールインワン」スライダー。

●多点位置決め制御および押当て制御可能
●繰返し位置決め精度±0.02mm(高精度形±0.015mm)
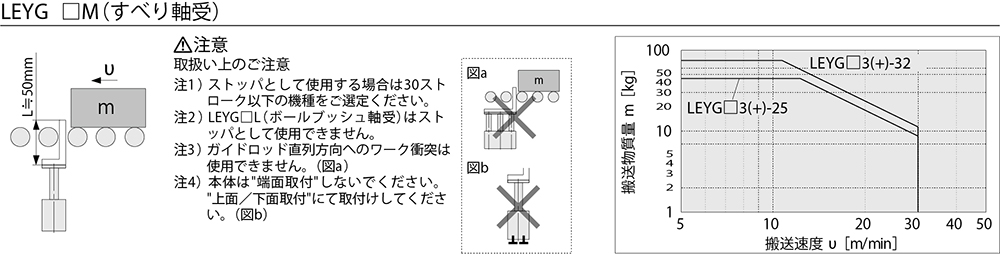
すべり軸受
- LEYG□3(+/M)-17M(L)(D)NM1A(B/C)-XXX-17L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP) - LEYG□3(+/M)-23M(L)(D)NM1A(B/C)-XXX-23L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP)
ボールブッシュ軸受
- LEYG□3(+/M)-17M(L)(D)NM1A(B/C)-XXX-17L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP) - LEYG□3(+/M)-23M(L)(D)NM1A(B/C)-XXX-23L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP)
| 型式 | LEYG□3(+/M)-25 | LEYG□3(+/M)-32 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| アクチュエータ仕様 | ストローク[mm] | 30・50・100・150・200・250・300・300・350・400 | 30・50・100・150・200・250・300・300・350・400・450・500 | ||||||
| 可搬質量[kg] ※注1 | 水平 | 3000[mm/s2] | 20 | 40 | 60 | 30 | 45 | 60 | |
| 2000[mm/s2] | 30 | 55 | 70 | 40 | 60 | 80 | |||
| 垂直 | 3000[mm/s2] | 7 | 15 | 29 | 9 | 20 | 41 | ||
| 最大押し当て推力[N] ※注2・3 | 163 | 327 | 653 | 247 | 495 | 990 | |||
| 最大速度[mm/s2] | 900 | 450 | 255 | 1000 | 500 | 250 | |||
| 最大加減速度[mm/s2] | 5,000 | ||||||||
| 繰り返し位置決め精度[mm/s2] | 基本形 | ±0.02 | |||||||
| 高精度形 | ±0.01 | ||||||||
| ロストモーション[mm] ※注4 | 基本形 | 0.1以下 | |||||||
| 高精度形 | 0.05以下 | ||||||||
| ねじリード[mm] | 12 | 6 | 3 | 16 | 8 | 4 | |||
| 耐衝撃/耐振動 ※注5 | 50/20 | ||||||||
| 駆動方式 | ボールねじ+ベルト(上側折返し)・ポールねじ(ストレート) | ||||||||
| ガイド方式 | すべり軸受・ボールプッシュ軸受 | ||||||||
| 使用温度範囲[℃] | 5~40 | ||||||||
| 使用温度範囲[%RH] | 5~90(結露なきこと) | ||||||||
| 電気仕様 | モータ出力/サイズ | 60W/□42ロング | 100W/□56ロング | ||||||
| モータ種類 | ステッピングモータ | ||||||||
| エンコーダ | インクリメンタル | ||||||||
| 電源電圧[V] | DC24±10% | ||||||||
- ※注1)水平:運搬質量の最大値です(外部にガイドが必要[ガイド摩擦係数:0.1以下])。
実際の運搬質量および運搬速度は、外部のガイド条件によって変わります。また、運搬質量により速度が変動します。
垂直:運搬質量により速度が変動します。また、()内の値は加減速度です。3000[mm/s2]以下に設定してください。 - ※注2)推当て推力の精度は±20%(F.S)となります。
- ※注3)ケーブル長さ・負荷・取付条件等により、速度・推力は変化する場合があります。
「M:すべり軸受」を選択した場合、リード「A」の最大速度は400[mm/s]になります。(無負荷/水平取付時)
また、水平取付/モーメント負荷時の速度が制限されます。 - ※注4)往復動作の誤差を補正する場合の目安値のなります。
- ※注5)耐衝撃・・・落下式衝撃試験で、送りねじの軸方向および直角方向にて誤作動なし(初期における値)。
耐振動・・・45~2000Hz1掃引、送りねじの軸方向および直角方向にて誤作動なし(初期における値)。
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 30 | 30 | 21 | 14 | 10 | 7 | 7 | 7 |
| 200 | 30 | 30 | 15 | 10 | 8 | 7 | 7 | 7 |
| 400 | 30 | 19 | 10 | 6 | 5 | 7 | 6 | 5 |
| 600 | 30 | 13 | 5 | 4 | 3 | 6 | 4 | 3 |
| 800 | 30 | 10 | 4 | 3 | 2 | 5 | 3 | 3 |
| 1000 | 30 | 8 | 4 | 3 | 2 | 3 | 3 | 2 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 55 | 55 | 42 | 28 | 21 | 15 | 15 | 15 |
| 100 | 55 | 55 | 31 | 20 | 15 | 15 | 15 | 15 |
| 200 | 55 | 38 | 19 | 13 | 10 | 15 | 13 | 10 |
| 300 | 55 | 26 | 13 | 9 | 6 | 12 | 9 | 6 |
| 400 | 55 | 20 | 10 | 7 | 5 | 9 | 7 | 5 |
| 500 | 55 | 15 | 8 | 5 | 4 | 7 | 5 | 4 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 70 | 70 | 70 | 55 | 42 | 29 | 29 | 29 |
| 25 | 70 | 70 | 70 | 49 | 37 | 29 | 29 | 29 |
| 50 | 70 | 70 | 61 | 41 | 31 | 29 | 29 | 29 |
| 100 | 70 | 70 | 38 | 26 | 19 | 29 | 26 | 19 |
| 150 | 70 | 51 | 26 | 17 | 13 | 23 | 17 | 13 |
| 200 | 70 | 41 | 20 | 14 | 10 | 19 | 14 | 10 |
| 250 | 70 | 31 | 15 | 10 | 8 | 14 | 10 | 8 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 40 | 40 | 36 | 24 | 18 | 9 | 9 | 9 |
| 200 | 40 | 40 | 36 | 24 | 18 | 9 | 9 | 9 |
| 400 | 40 | 34 | 17 | 11 | 8 | 9 | 9 | 8 |
| 600 | 40 | 23 | 11 | 8 | 6 | 9 | 8 | 6 |
| 800 | 40 | 17 | 8 | 6 | 4 | 8 | 6 | 4 |
| 1000 | 40 | 13 | 7 | 4 | 3 | 6 | 4 | 3 |
| 1200 | 40 | 11 | 6 | 4 | 3 | 5 | 4 | 3 |
| 1333 | 40 | 10 | 5 | 3 | 3 | 5 | 3 | 3 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 60 | 60 | 60 | 48 | 36 | 20 | 20 | 20 |
| 100 | 60 | 60 | 55 | 36 | 27 | 20 | 20 | 20 |
| 200 | 60 | 60 | 34 | 22 | 17 | 20 | 20 | 17 |
| 300 | 60 | 45 | 23 | 15 | 11 | 20 | 15 | 11 |
| 400 | 60 | 34 | 17 | 11 | 8 | 15 | 11 | 8 |
| 500 | 60 | 27 | 13 | 9 | 7 | 12 | 9 | 7 |
| 600 | 60 | 23 | 11 | 8 | 6 | 10 | 8 | 6 |
| 667 | 60 | 20 | 10 | 7 | 5 | 9 | 7 | 5 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 80 | 80 | 80 | 80 | 72 | 41 | 41 | 41 |
| 50 | 80 | 80 | 80 | 73 | 55 | 41 | 41 | 41 |
| 100 | 80 | 80 | 67 | 45 | 34 | 41 | 41 | 34 |
| 150 | 80 | 80 | 45 | 30 | 23 | 41 | 30 | 23 |
| 200 | 80 | 67 | 34 | 22 | 17 | 31 | 22 | 17 |
| 250 | 80 | 54 | 27 | 18 | 13 | 24 | 18 | 13 |
| 300 | 80 | 45 | 23 | 15 | 11 | 21 | 15 | 11 |
| 333 | 80 | 40 | 20 | 13 | 10 | 18 | 13 | 10 |



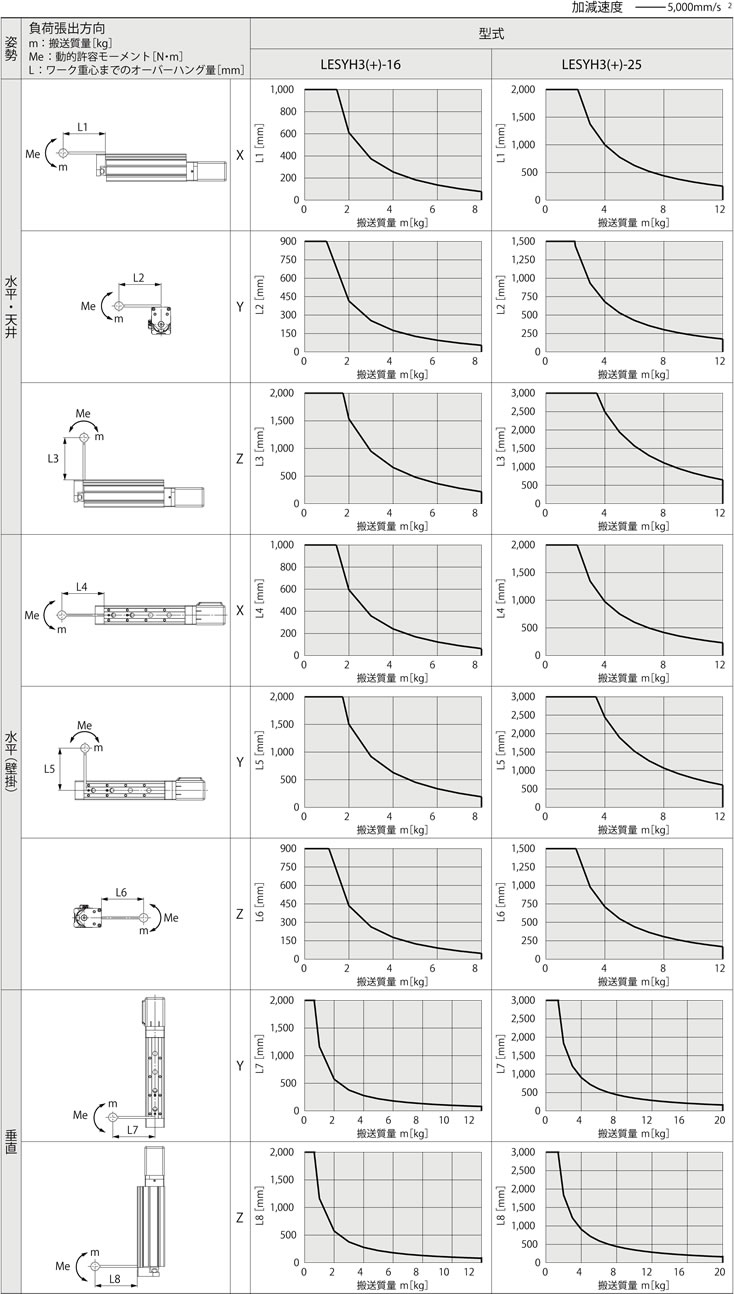
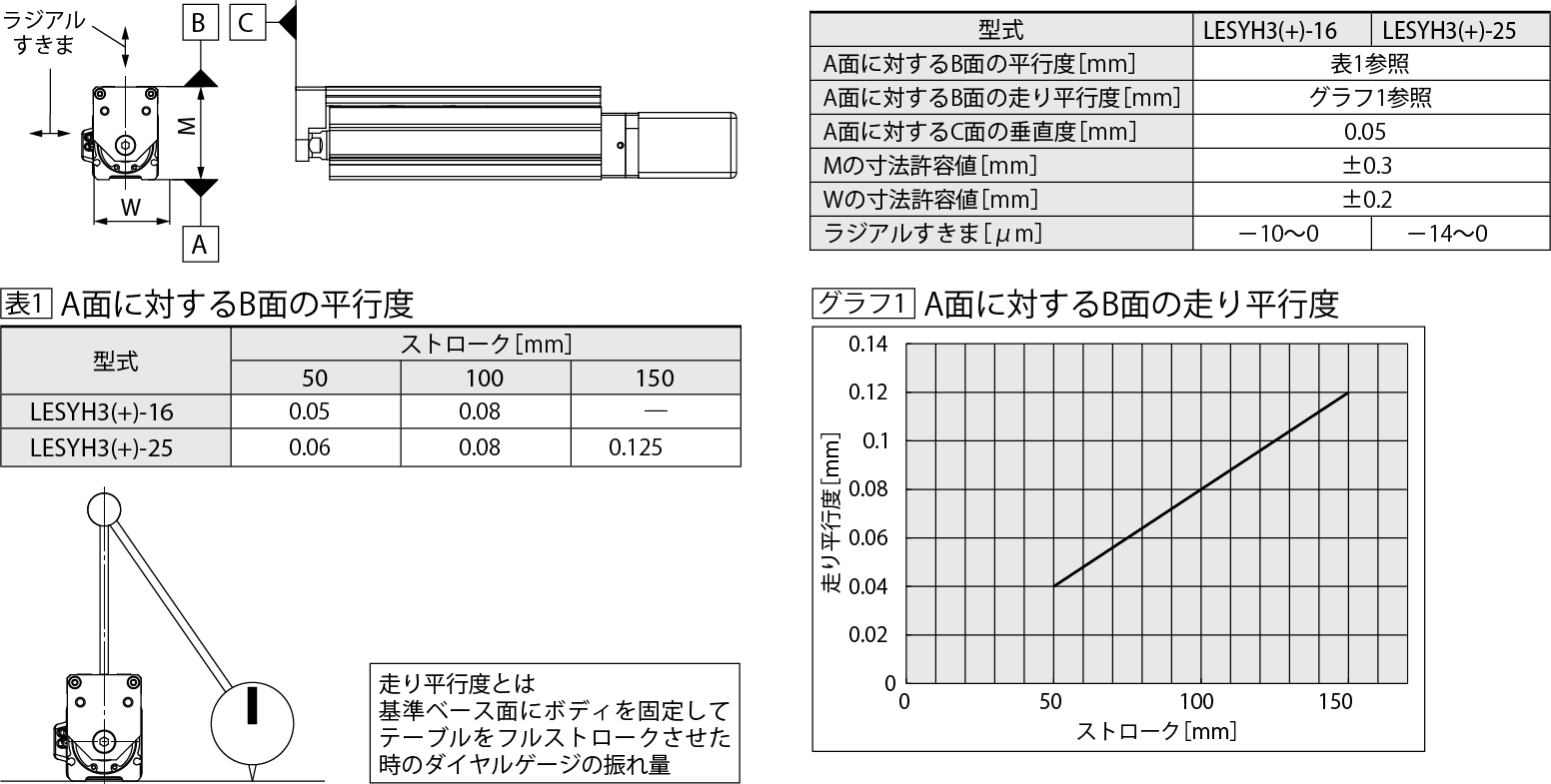
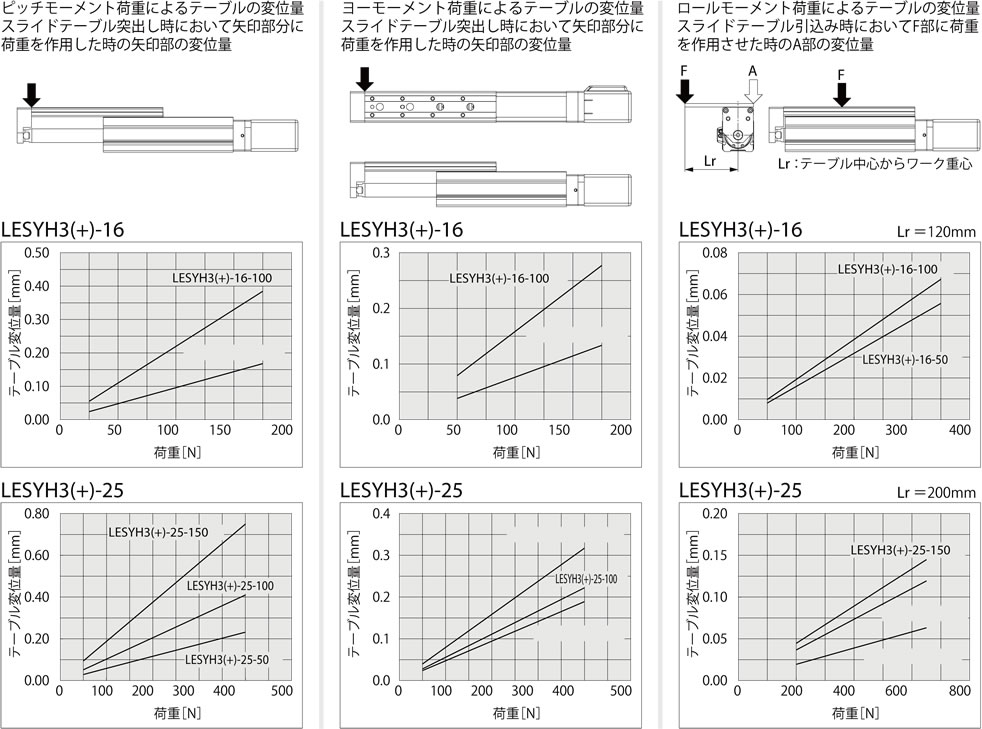
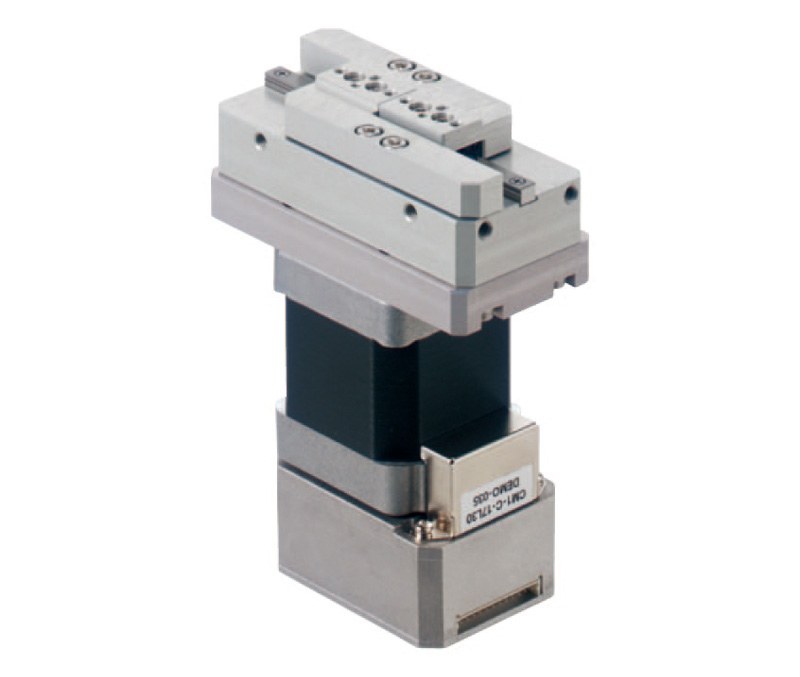
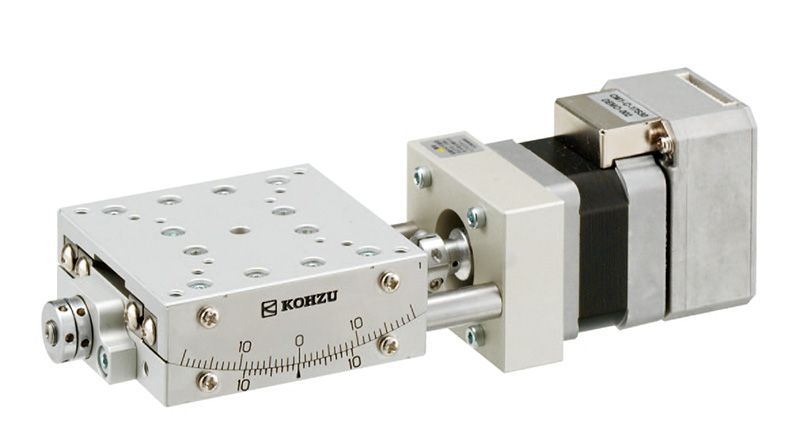
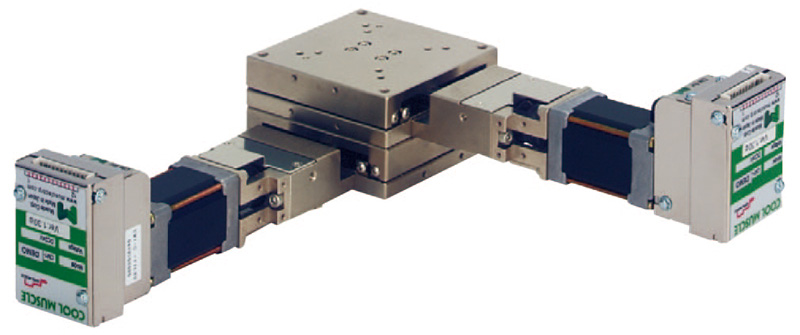
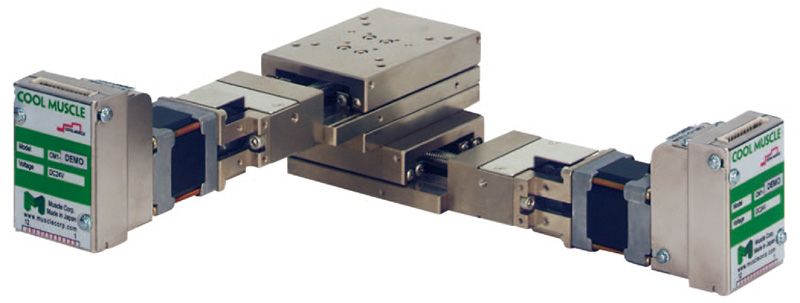
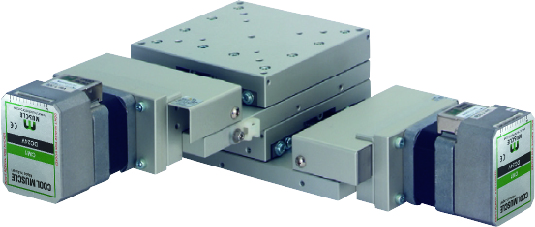
スライドテーブルタイプ
ACサーボモータの高速・高精度・低発熱と、ステッピングモータの高トルクを併せ持つ特性を保有し、
ドライバ・コントローラ・モータ・直動機構を組み合わせた「オールインワン」スライダー。
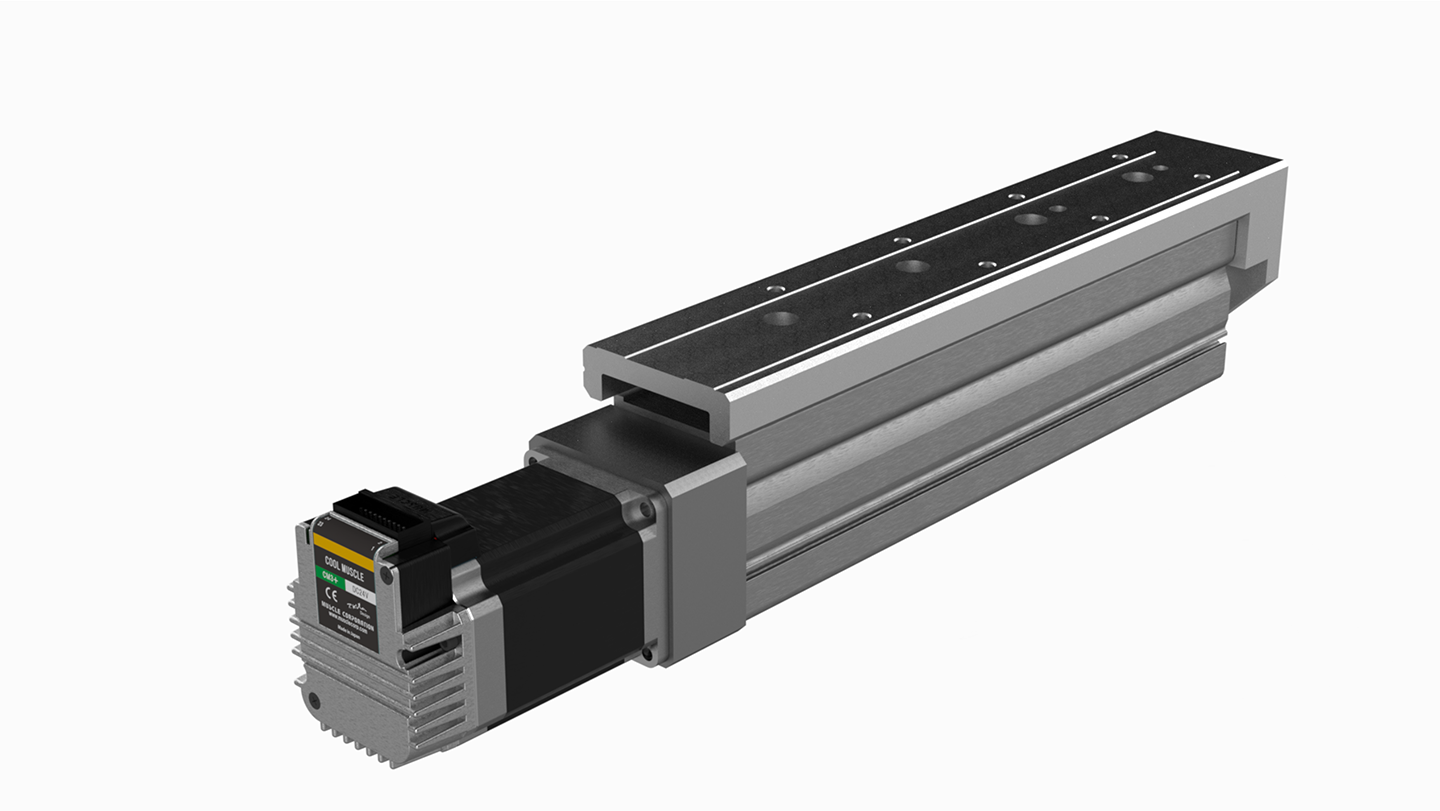
●繰返し位置決め精度±0.01mm
●ロストモーション0.1mm以下
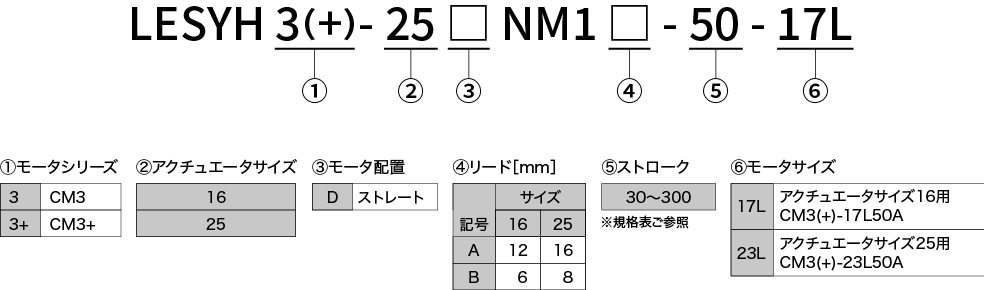
- LESYH3(+/M)-16D(/R/L)NM1A(B)-XXX-17L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP) - LESYH3(+/M)-25D(/R/L)NM1A(B)-XXX-23L
- 2D CAD
(PDF) - 2D CAD
(DWG) - 3D CAD
(IGS/STEP)
| 型式 | LESYH(+/M)-16 | LESYH(+/M)-25 (折り返し) |
||||
|---|---|---|---|---|---|---|
| アクチュエータ仕様 | ストローク[mm] | 50・100 | 50・100・150 | |||
| 最大可搬質量[kg] | 水平 | 8 | 12 | |||
| 垂直 | 12 | 6 | 20 | 10 | ||
| 最大押し当て推力 ※注2 | 327 | 163 | 245(196) | 123(98) | ||
| 最大速度[mm/s] ※注1 | 200 | 400 | 200 | 400 | ||
| 最大加減速度[mm/s2] | 5,000 | |||||
| 繰り返し位置決め精度[mm/s2] | ±0.01 | |||||
| ロストモーション[mm] ※注3 | 0.1以下 | |||||
| ねじリード[mm] | 6 | 12 | 8(10) | 16(20) | ||
| 耐衝撃/耐振動 ※注4 | 50/20 | |||||
| 駆動方式 | ボールねじ | ボールねじ(ボールねじ+ベルト) (1.25:1) |
||||
| ガイド方式 | リニアガイド(循環) | |||||
| 使用温度範囲[℃] | 5~40 | |||||
| 使用温度範囲[%RH] | 5~90(結露なきこと) | |||||
| 電気仕様 | モータ出力/サイズ | 60W/□42ロング | ||||
| モータ種類 | ステッピングモータ | |||||
| エンコーダ | インクリメンタル | |||||
| 電源電圧[V] | DC24±10% | |||||
- ※注1)運搬送料によって速度が変動します。
- ※注2)推当て推力の精度は±20%(F.S)です。
- ※注3)往復動作の誤差を補正する場合の目安値となります。
- ※注4)耐衝撃・・・落下式衝撃試験で、送りねじの軸方向および直角方向にて誤作動なし(初期における値)。
耐振動・・・45~2000Hz1掃引、送りねじの軸方向および直角方向にて誤作動なし(初期における値)。
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 8 | 8 | 8 | 8 | 8 | 6 | 6 | 6 |
| 200 | 8 | 8 | 8 | 8 | 8 | 6 | 6 | 6 |
| 400 | 8 | 8 | 8 | 6 | 5 | 6 | 6 | 5 |
| 600 | 8 | 8 | 6 | 4 | 3 | 6 | 4 | 3 |
| 800 | 8 | 8 | 5 | 3 | 3 | 5 | 3 | 3 |
| 1000 | 8 | 8 | 4 | 3 | 2 | 3 | 3 | 2 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 8 | 8 | 8 | 8 | 8 | 12 | 12 | 12 |
| 50 | 8 | 8 | 8 | 8 | 8 | 12 | 12 | 12 |
| 100 | 8 | 8 | 8 | 8 | 8 | 12 | 12 | 12 |
| 200 | 8 | 8 | 8 | 8 | 8 | 12 | 12 | 10 |
| 300 | 8 | 8 | 8 | 8 | 6 | 12 | 9 | 6 |
| 400 | 8 | 8 | 8 | 7 | 5 | 9 | 7 | 5 |
| 500 | 8 | 8 | 8 | 5 | 4 | 7 | 5 | 4 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 12 | 12 | 12 | 10 | 8 | 10 | 10 | 8 |
| 200 | 12 | 12 | 12 | 8 | 6 | 10 | 8 | 6 |
| 400 | 12 | 12 | 9 | 6 | 4 | 8 | 6 | 4 |
| 600 | 12 | 12 | 6 | 4 | 3 | 6 | 4 | 3 |
| 800 | 12 | 10 | 5 | 3 | 2 | 4 | 3 | 2 |
| 1000 | 12 | 8 | 4 | 3 | 2 | 4 | 3 | 2 |
| 1200 | 12 | 7 | 3 | 2 | 2 | 3 | 2 | 2 |
| 1333 | 12 | 6 | 3 | 2 | 1 | 3 | 2 | 1 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 12 | 12 | 12 | 12 | 12 | 20 | 20 | 16 |
| 100 | 12 | 12 | 12 | 12 | 12 | 20 | 17 | 13 |
| 200 | 12 | 12 | 12 | 12 | 9 | 16 | 12 | 9 |
| 300 | 12 | 12 | 12 | 9 | 6 | 12 | 9 | 6 |
| 400 | 12 | 12 | 10 | 6 | 5 | 9 | 6 | 5 |
| 500 | 12 | 12 | 8 | 5 | 4 | 7 | 5 | 4 |
| 600 | 12 | 12 | 7 | 4 | 3 | 6 | 4 | 3 |
| 667 | 12 | 12 | 6 | 4 | 3 | 5 | 4 | 3 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 12 | 12 | 12 | 8 | 6 | 10 | 8 | 6 |
| 250 | 12 | 12 | 10 | 7 | 5 | 9 | 7 | 5 |
| 500 | 12 | 12 | 7 | 5 | 4 | 6 | 5 | 4 |
| 750 | 12 | 10 | 5 | 3 | 3 | 5 | 3 | 3 |
| 1000 | 12 | 8 | 4 | 3 | 2 | 3 | 3 | 2 |
| 1250 | 12 | 7 | 3 | 2 | 2 | 3 | 2 | 2 |
| 1500 | 12 | 5 | 3 | 2 | 1 | 2 | 2 | 1 |
| 1667 | 12 | 5 | 2 | 2 | 1 | 2 | 2 | 1 |
| 水平最大可搬重量(kg) | 垂直最大可搬重量(kg) | |||||||
|---|---|---|---|---|---|---|---|---|
| 速度(mm/s) | 加速度(G) | |||||||
| 0.1 | 0.5 | 1 | 1.5 | 2 | 0.1 | 0.5 | 1 | |
| 0 | 12 | 12 | 12 | 12 | 12 | 20 | 17 | 12 |
| 125 | 12 | 12 | 12 | 12 | 10 | 18 | 14 | 10 |
| 250 | 12 | 12 | 12 | 9 | 7 | 13 | 9 | 7 |
| 375 | 12 | 12 | 10 | 7 | 5 | 9 | 7 | 5 |
| 500 | 12 | 12 | 8 | 5 | 4 | 7 | 5 | 4 |
| 625 | 12 | 12 | 7 | 4 | 3 | 6 | 4 | 3 |
| 750 | 12 | 11 | 5 | 4 | 3 | 5 | 4 | 1 |
| 833 | 12 | 9 | 5 | 3 | 2 | 4 | 3 | 2 |
クールマッスル1用
RL-Tロッドレスタイプ

| 項目 | 単位 | RL-45T | RL-60T | ||
| ボールねじリード | mm | 6 | 12 | 6 | 12 |
|---|---|---|---|---|---|
| 最高速度 | mm/s | 300 | 600 | 300 | 600 |
| 最大加速度 | G | 0.3 | |||
| 水平可搬質量 | kg | 10 | 5 | 30 | 16 |
| 垂直可搬質量 | kg | 3 | 1.5 | 10 | 5 |
| 繰り返し位置決め精度 | mm | ±0.02 | |||
| ストローク | mm | 50~500 | 50~600 | ||
RD-Tロッドレスタイプ
| 項目 | 単位 | RD-35T | RD-45T | RD-55T | |
| ボールねじリード | mm | 12 | |||
|---|---|---|---|---|---|
| 最高速度 | mm/s | 600 | 600 ※1 | ||
| 最大推力 | N | 40 | 194 | 169 | |
| 水平可搬質量 | kg | 3 | 15 | 20 | |
| 垂直可搬質量 | kg | 1.3 | 6.7 | 5.2 | |
| 繰り返し位置決め精度 | mm | ±0.02 | |||
| ストローク | mm | 50~150 | 50~200 | 50~300 | |
※ストローク300mmの最高速度は470
RK-TM 高剛性ミニチュアステンレスタイプ
| 項目 | 単位 | RK-15TM |
| ボールねじリード | mm | 1 |
|---|---|---|
| 有効ストローク | mm | 31.4~156.4 |
| 最高速度 | mm/s | 50 |
| 水平可搬質量 | kg | 27 |
| 繰り返し位置決め精度 | mm | ±0.004 |
RK-T 高剛性タイプ
| 項目 | 単位 | RK-20T | RK-26T | RK-33T(17L) | RK-33T(23L) | ||
| ボールねじリード | mm | 1 | 2 | 6 | 10 | 6 | 10 |
|---|---|---|---|---|---|---|---|
| 有効ストローク | mm | 41.5~141.5 | 61~219 | 61.5~511.5 | |||
| 最高速度 | mm/s | 50 | 100 | 300 | 500 | 200 | 333 |
| 最大加速度 | G | 0.3 | |||||
| 水平可搬質量 | kg | 56 | 28 | 64 | 38 | 147 | 87 |
| 繰り返し位置決め精度 | mm | ±0.01 | |||||
SRW 幅広ガイドアクチュエータねじ駆動タイプ

| 項目 | 単位 | SRW06 | SRW10 |
| 最高速度 | mm/s | 100 | |
|---|---|---|---|
| 水平可搬質量 | kg | 10 | 15 |
| 駆動方式 | すべりねじ | ||
| すべりねじリード | mm | 2 | |
| すべりねじ直径 | mm | 5 | |
| 繰り返し位置決め精度 | mm | ±0.05 | |
| ストローク | mm | 50~200 | |
BRW 幅広ガイドアクチュエータベルト駆動タイプ

| 項目 | 単位 | BRW06 | BRW10 |
| 最高速度 | mm/s | 1200 | |
|---|---|---|---|
| 水平可搬質量 | kg | 5 | 8 |
| 駆動方式 | タイミングベルト | ||
| 移動距離(プーリー1回転時) | 48.7 | ||
| 繰り返し位置決め精度 | mm | ±0.08 | |
| ストローク | mm | 100~500 | |
MHD 高剛性リニアガイド付ミニチュアサーボハンド
| 項目 | 単位 | MHD05-5 | MHD05-9 | MHD20-40 |
| 動作ストローク | mm | 5 | 9 | 40 |
|---|---|---|---|---|
| 最大爪長さ | mm | 80 | 90 | 150 |
| 把持力 | N | 5 | 5 | 20 |
| 所要時間(フルストローク) | sec | 0.011 | 0.018 | 0.034 |
| 繰り返し位置決め精度 | mm | ±0.01 | ||
| 停止精度 | mm | ±0.05 | ||
HIG ミニチュア高速インデックスアクチュエータ

| 項目 | 単位 | HIG-11H-05 | HIG-11H-09 | HIG-14H-05 | HIG-14H-11 |
| 減速比 | 5 | 9 | 5 | 11 | |
|---|---|---|---|---|---|
| 伝達効率 | % | 85 | |||
| 定格出力トルク | Nm | 1.53 | 2.75 | 3.7 | 8.13 |
| 最大出力トルク | Nm | 2.2 | 3.96 | 5.27 | 11.59 |
| 最大回転数 | RPM | 600 | 333 | 400 | 181 |
| 角度伝達精度 | arc min | 3 | 3 | 4 | 4 |
IG ミニチュアインデックスアクチュエータ

| 項目 | 単位 | IG-8H | IG-11H | IG-14H |
| 減速比 | 30 | |||
|---|---|---|---|---|
| 最大回転数 | RPM | 100 | 100 | 66.7 |
| 角度伝達精度 | arc min | 2 | 2 | 2 |
| 概略質量 | kg | 0.45 | 0.7 | 1.5 |
RG ミニチュアロータリーアクチュエータ
| 項目 | 単位 | RG-8H | RG-11H | RG-14H |
| 減速比 | 30 | |||
|---|---|---|---|---|
| 最大回転数 | RPM | 100 | 100 | 66.7 |
| 角度伝達精度 | arc min | 2 | 2 | 2 |
| 概略質量 | kg | 0.5 | 0.75 | 1.55 |
RS リニアボールガイドステージ

| 項目 | 単位 | RS-4040-13 | RS-5050-13 | RS-6060-15 | RS-7070-15 |
| ストローク | mm | 13 | 15 | ||
|---|---|---|---|---|---|
| ステージ面サイズ | mm | 40×40 | 50×50 | 60×60 | 70×70 |
| 送りねじ | mm | ボールねじ6Φ/リード1 | |||
| 最高速度 | mm/sec | 10 | |||
| 耐荷重 | kgf(N) | 10(98) | |||
| 繰り返し位置決め精度 | μm | ≦±0.5 | |||
RLS リニアボールガイドロングステージ
| 項目 | 単位 | RLS-4060-30 | RLS-5070-30 | RLS-60100-50 | RLS-70110-50 |
| ストローク | mm | 30 | 50 | ||
|---|---|---|---|---|---|
| ステージ面サイズ | mm | 40×60 | 50×70 | 60×100 | 70×110 |
| 送りねじ | mm | ボールねじ6Φ/リード1 | |||
| 最高速度 | mm/sec | 10 | |||
| 耐荷重 | kgf(N) | 10(98) | |||
| 繰り返し位置決め精度 | μm | ≦±0.5 | |||
ZRS リニアボールガイドステージ

| 項目 | 単位 | ZRS-4040-13 | ZRS-5050-13 | ZRS-6060-15 | ZRS-7070-15 |
| ストローク | mm | 13 | 15 | ||
|---|---|---|---|---|---|
| ステージ面サイズ | mm | 40×40 | 50×50 | 60×60 | 70×70 |
| 送りねじ | mm | ボールねじ6Φ/リード1 | |||
| 最高速度 | mm/sec | 10 | |||
| 耐荷重 | kgf(N) | 5(49) | |||
| 繰り返し位置決め精度 | μm | ≦±0.5 | |||
CR 精密クロスローラステージ
| 項目 | 単位 | CR-5050-7.5 | CR-7070-10 | CR-100100-12.5 | |
| 動作ストローク | mm | ±7.5 | ±10 | ±12.5 | |
|---|---|---|---|---|---|
| ステージ面サイズ | mm | 50×50 | 70×70 | 100×100 | |
| ボールねじリード | mm | 1 | |||
| 最高速度 | mm/s | 5 | |||
| 繰り返し位置決め精度 | μm | ≦±0.5 | |||
| 水平耐荷重 | kgf | 5 | 10 | 20 | |
ZCR Z軸精密クロスローラステージ

| 項目 | 単位 | ZCR-5050-7.5 | ZCR-7070-10 | ZCR-100100-12.5 | |
| 動作ストローク | mm | ±7.5 | ±10 | ±12.5 | |
|---|---|---|---|---|---|
| ステージ面サイズ | mm | 50×50 | 70×70 | 100×100 | |
| ボールねじリード | mm | 0.5 | |||
| 最高速度 | mm/s | 2.5 | |||
| 繰り返し位置決め精度 | μm | ≦±0.5 | |||
| 耐荷重 | kgf | 2.5 | 5 | 10 | |
RW θ軸精密回転ステージ
| 項目 | 単位 | RW-50 | RW-70 | RW-100 |
| ステージ面サイズ | mm | Φ49 | Φ68 | Φ98 |
|---|---|---|---|---|
| 減速比 | 1/90 | 1/90 | 1/180 | |
| 移動範囲 | degree | ±180 | ||
| 最小送り量 | degree/pulse | 0.00008 | 0.00008 | 0.00004 |
| 最高速度 | RPM | 300 | 300 | 600 |
| 水平耐荷重 | kgf | 4 | 6 | 10 |
SS θ軸精密スイベルステージ
| 項目 | 単位 | SS-50-T | SS-70-T | SS-100-T |
| ステージ面サイズ | mm | 50×50 | 70×70 | 100×100 |
|---|---|---|---|---|
| ワークディスタンス | mm | 50±0.2 | 70±0.2 | 95±0.2 |
| 回転範囲 | degree | ±10 | ||
| 最小送り量 | degree | 0.000031 | ||
| 最高速度 | RPM | 300 | 300 | 600 |
| 水平耐荷重 | kgf | 3 | 5 | 7 |
RSG リニアボールガイドXYステージ
| 項目 | 単位 | RSG-4040-13 | RSG-5050-13 | RSG-6060-15 | RSG-7070-15 |
| ストローク | mm | 13 | 15 | ||
|---|---|---|---|---|---|
| ステージ面サイズ | mm | 40×40 | 50×50 | 60×60 | 70×70 |
| 送りねじ | mm | ボールねじ6Φ/リード1 | |||
| 最高速度 | mm/sec | 10 | |||
| 耐荷重 | kgf(N) | 8(78) | |||
| 繰り返し位置決め精度 | μm | ≦±0.5 | |||
RLSG リニアボールガイドXYロングステージ
| 項目 | 単位 | RLSG-4060-30 | RLSG-5070-30 | RLSG-60100-50 | RLSG-70110-50 |
| ストローク | mm | 30 | 50 | ||
|---|---|---|---|---|---|
| ステージ面サイズ | mm | 40×60 | 50×70 | 60×100 | 70×110 |
| 送りねじ | mm | ボールねじ6Φ/リード1 | |||
| 最高速度 | mm/sec | 10 | |||
| 耐荷重 | kgf(N) | 8(78) | |||
| 繰り返し位置決め精度 | μm | ≦±0.5 | |||
YCR 精密クロスローラXYステージ
| 項目 | 単位 | YCR-5050-7.5 | YCR-7070-10 | YCR-100100-12.5 | |
| 動作ストローク | mm | ±7.5 | ±10 | ±12.5 | |
|---|---|---|---|---|---|
| ステージ面サイズ | mm | 50×50 | 70×70 | 100×100 | |
| ボールねじリード | mm | 1 | |||
| 最高速度 | mm/sec | 5 | |||
| 繰り返し位置決め精度 | μm | ≦±0.5 | |||
| 水平耐荷重 | kgf | 4 | 9 | 18 | |

クールマッスル2用
RL2-60T ローコストロッドレスタイプ

| 項目 | 単位 | RL2-60T100 | RL2-60T200 | ||
| ボールねじリード | mm | 6 | 12 | 6 | 12 |
|---|---|---|---|---|---|
| 最高速度 | mm/s | 340~500 | 680~1000 | 340~500 | 680~1000 |
| 最大加速度 | G | 0.3 | |||
| 水平可搬質量 | kg | 16 | 8 | 30 | 16 |
| 垂直可搬質量 | kg | 5 | 2.5 | 10 | 5 |
| 繰り返し位置決め精度 | mm | ±0.02 | |||
| ストローク | mm | 50~600 | |||
