機械のタクトタイムをさらに短縮したいが
トータルコストは抑えたいです。
安価に実現する方法はありませんか?
まずタクトタイムを短縮するにはモータ動作の高速化はもちろん、
起動信号入力後の応答性も重要です
起動信号入力後の応答性
通信速度が高速になり、ネットワークで全ての機器が繋がることが多くなりましたが、 全ての機器をPLCで一括制御することでトータルコストが跳ね上がり、場合によっては機械のタクトタイムが上がらない可能性があります。CM3+は入力信号の応答性を上げることで従来よりもさらに機械のタクトタイムの向上に貢献することが可能となりました。
センサの信号をPLCで制御する場合、センサ信号入力処理時間、通信周期の待機時間により若干のタイムロスが発生します。
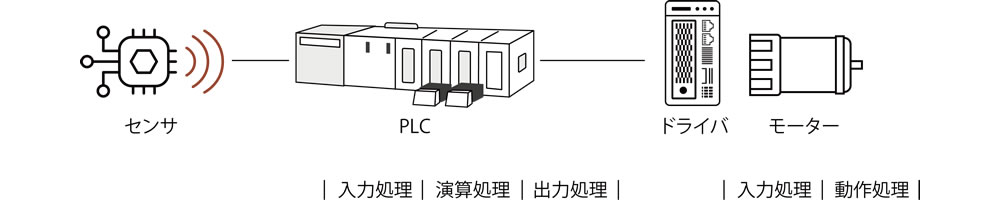
センサ信号を直接CM3+に接続することでセンサがONしたら即座にモータ駆動させることが可能です。

- 伝送周期の速いMECHAdivOLINK-III(31.25μs)やEdterCAT(62.5μs)などと比較すると1msecの応答性は遅くないですか?
- 伝送周期を高速に設定すると、PLCの処理能力に制限があるため、 接続できる軸数が限られてきます。
また、高速処理させるためには高価なPLCが必要となり、装置のトータルコストが上がってしまいます。
PLCの負担を最小限に抑え、CM3+による ローカル高速応答制御を行うことで、 システム全体の効率化、コスト削減が可能となります。
PTP動作とプログラム動作の違い
PLCからPTPでモータを制御する場合、各位置決め完了毎にPLCで処理する必要があります
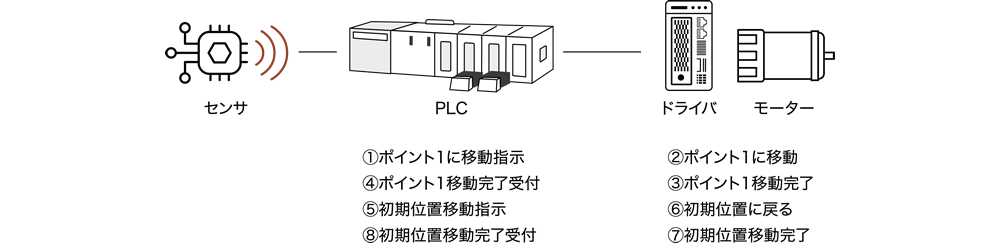
CM3+にプログラムを保持させることで、 起動信号を送るだけであとはCM3+が状況に応じた制御を行います

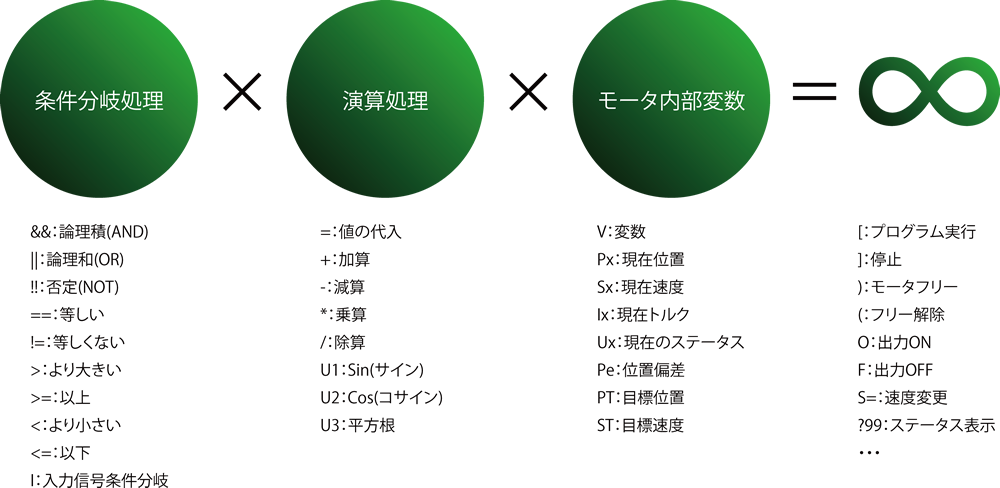
CM3+のプログラム機能(ロジックバンク)
モータ内部のCPUが動作状況や外部環境に応じた条件分岐処理、演算処理を実行するため幅広い制御開発が可能となります。
※CM3+には位置決めなどの動作シーケンスプログラム(モーションバンク)と条件分岐処理や演算処理を周期的に実行するプログラム(ロジックバンク)の2種類があり、2つのプログラムを同時に実行することができます。
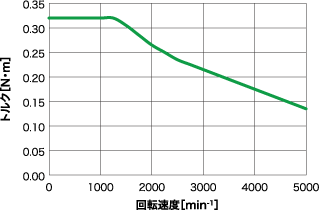
モータ動作の高速化
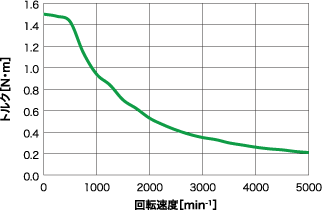
CM3+はステッピングモータをサーボ制御することでサーボ性能を安価に実現しています。
ステッピングモータは通常高加速制御をすると脱調するため、高加減速での用途には使用できませんが CM3+は脱調レスにより、トルクカーブに沿った加速トルクを出力することができます。
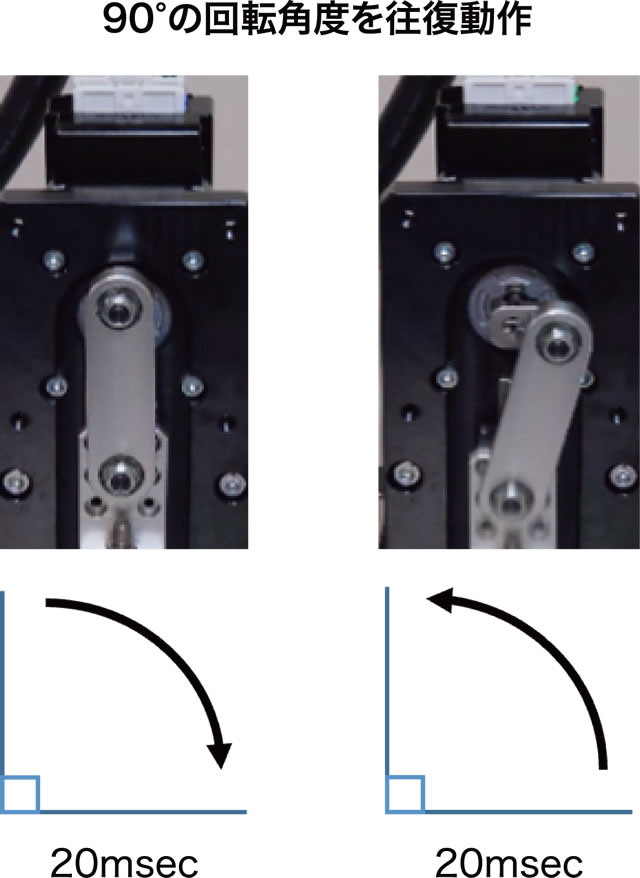
- サーボと比較するとどちらが速いですか?
- 使用する最高速度によりますが、移動距離の少ない高速往復動作が必要なアプリケーションであれば低速域で十分な加速トルクを使用することができるためサーボモータと同等の性能が発揮できます。
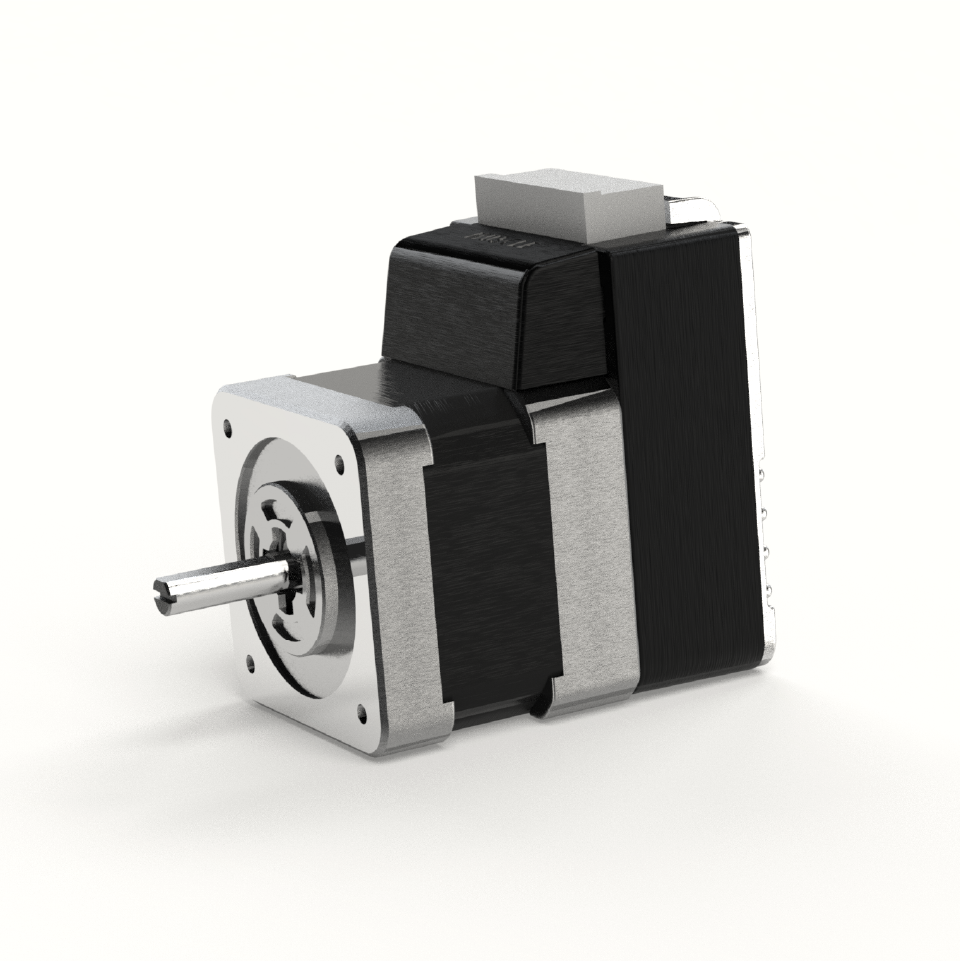
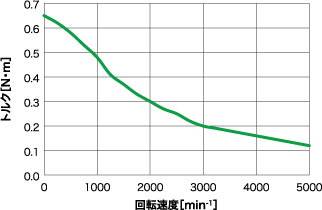
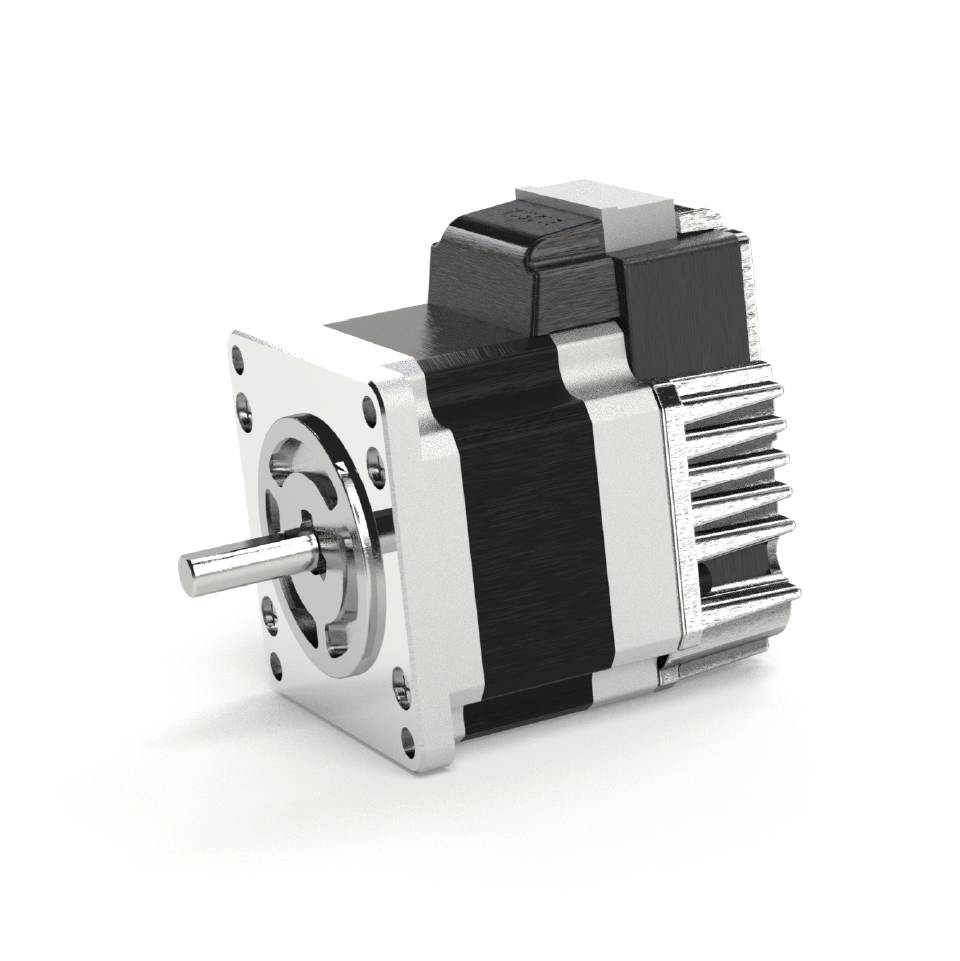
CM3+-17S50A
- 最高速度:5,000rpm
- 最大トルク:0.32Nm
- モータサイズ[mm]
- 42
- モータ出力[w]
- 60
- パルス指令分解能
- 300~12,00[pulse/回転]から選択可
- 重量[g]
- 295
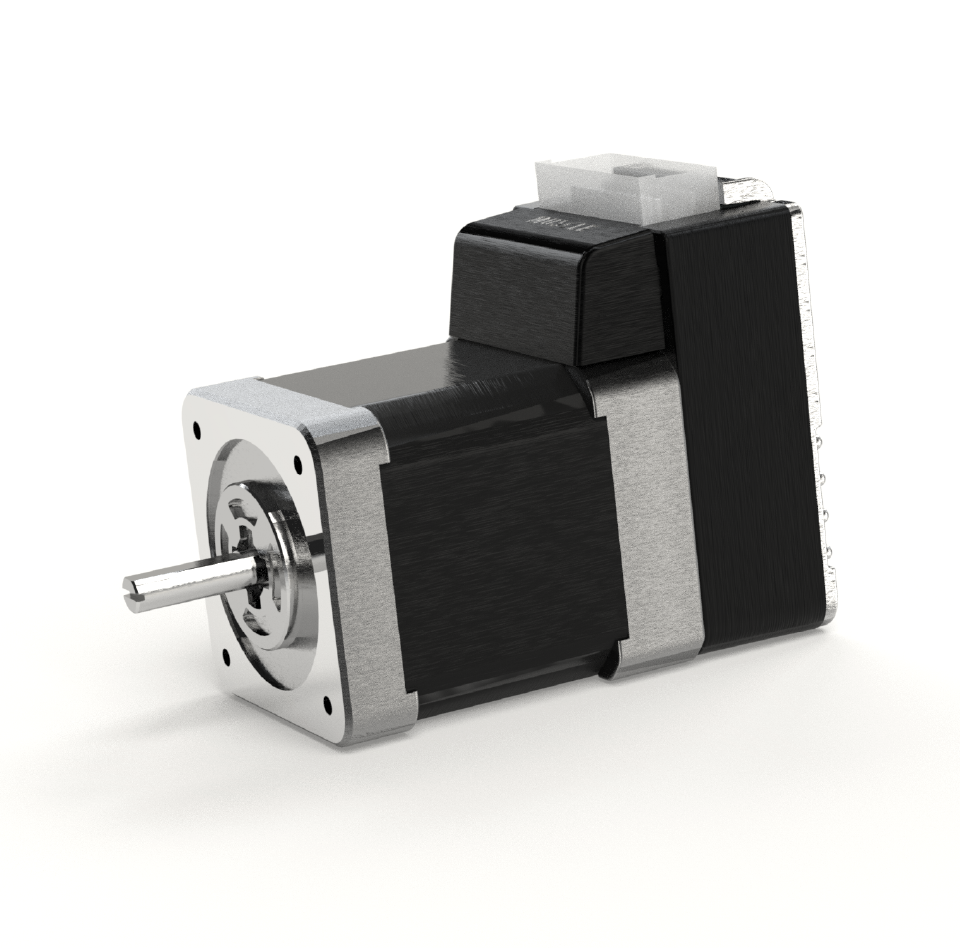
CM3+-17L50A
- 最高速度:5,000rpm
- 最大トルク:0.65Nm
- モータサイズ[mm]
- 42
- モータ出力[w]
- 60
- パルス指令分解能
- 300~12,00[pulse/回転]から選択可
- 重量[g]
- 435
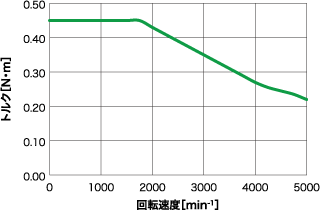
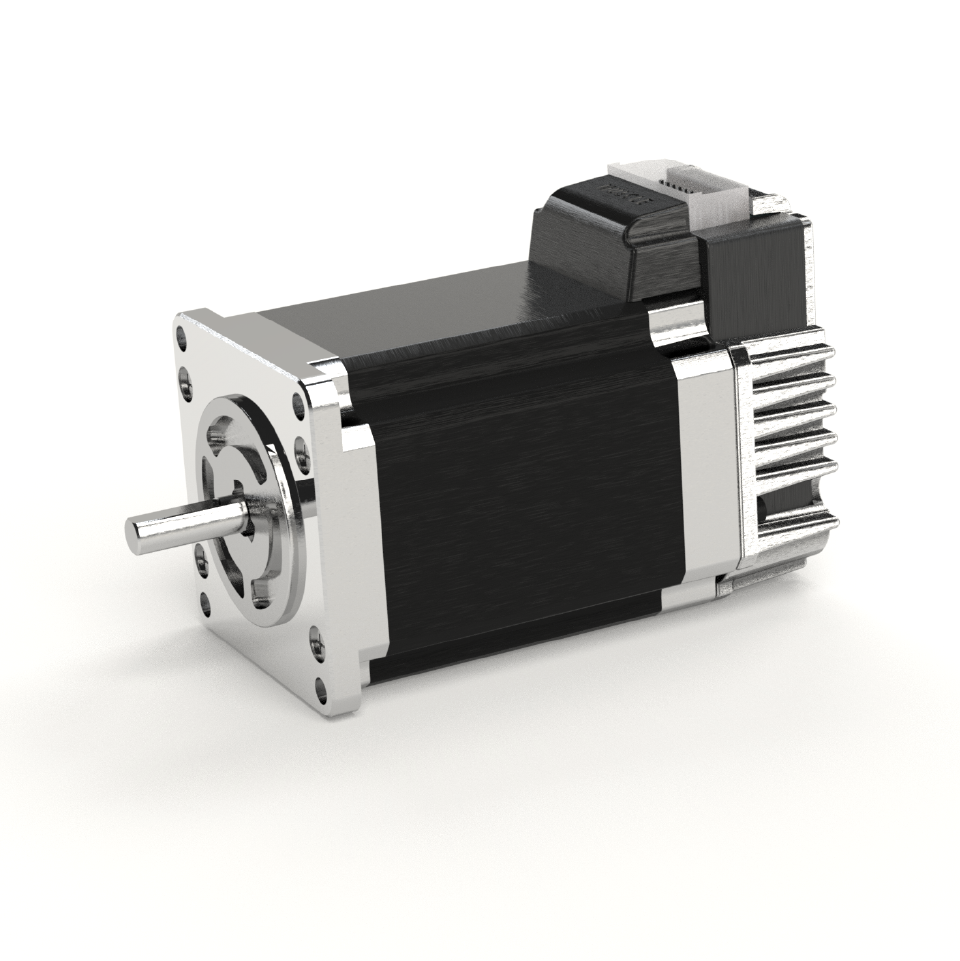
CM3+-23S50A
- 最高速度:5,000rpm
- 最大トルク:0.45Nm
- モータサイズ[mm]
- 42
- モータ出力[w]
- 80
- パルス指令分解能
- 300~12,00[pulse/回転]から選択可
- 重量[g]
- 525
CM3+-23L50A
- 最高速度:5,000rpm
- 最大トルク:1.50Nm
- モータサイズ[mm]
- 42
- モータ出力[w]
- 100
- パルス指令分解能
- 300~12,00[pulse/回転]から選択可
- 重量[g]
- 1,050